Hi all. Another “Loss of altitude” topic. It’s 5 kg 8X Copter, that just descended uncommanded and very quick. I was unable to stop the descend - it just ignored the throttle command for a couple of seconds. This happened a couple of times today. Sometimes it gave me control back just centimeters above ground, sometimes it hit the ground hard and climed again. Any Ideas? Thanks.
Thanks for your help. I use T-Motor GF MN3510-25 360KV, and a 5S (20300 mAh) Li-Ion battery.
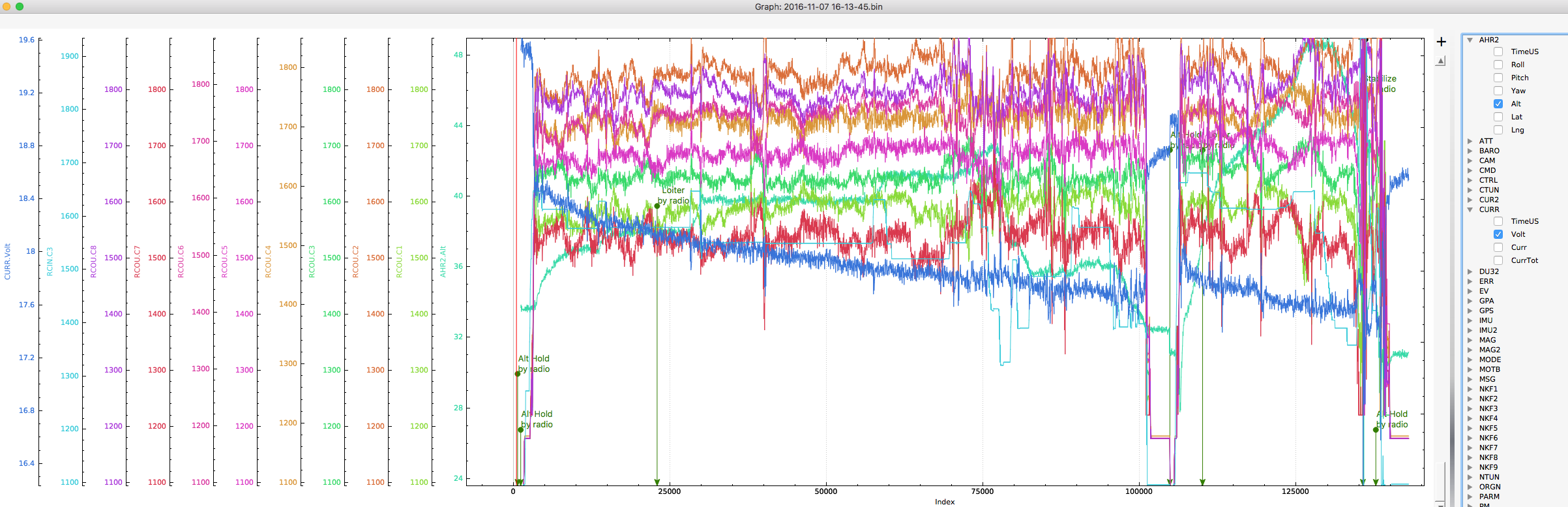
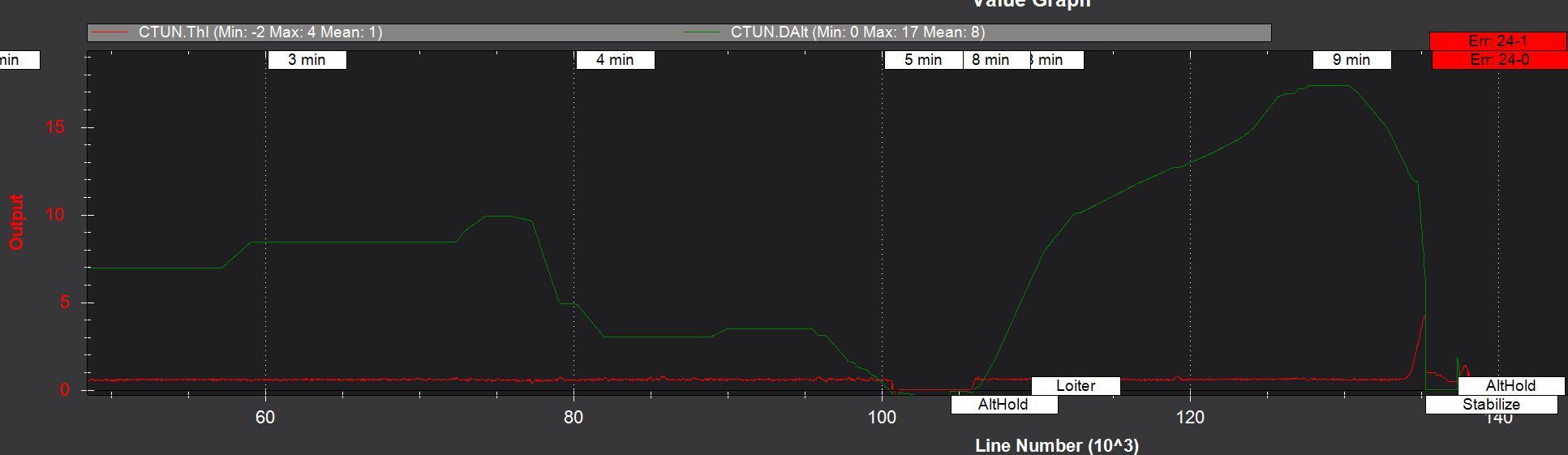
Underpowered? That is an idea. But that is an general problem, isn’t it. Any idea, why it started descending this rapidly at this particulary moment at about 9min (line 130.000)?
If I read the log correctly, CTUN.DAlt goes down shortly after this moment and the copter follows, just as it should. DAlt ist desired altitude, right? In other words, the altitude I command using the RC, right? That is CTUN.ThI? But that value did not change for more than a minute before the copter went down.
That is, because I waited for this to happen. I had a couple of fligts the last days. In all of them the copter descended down very quick after about 5-10 min ish. It ignored throttle changes, or mode changes for a few seconds (till it hit the ground and broke something). After that, it climed normally, I flew it back to me and landed normally.
Strange.
Thanks Mike. Thanks for your time and help. In fact, I am about to change motors. But still, why does it fly ok for 5 to 10 minutes and then, suddenly falls without me having control? In other words, what makes CTUN.DAlt go down?
Not me.
As we only have half the picture for power supply, no amps, I can’t really say.
But I am suspecting the LiIon batteries from past experience.
They are good for low current applications but not for high current, such as multi rotors.
If you can get the Amp reading happening I am sure a test flight would show a loss of amps after 10 minutes.
Oisa, Sounds very similar to an experience I had, and was able to duplicate on several occasions. Ultimately I replaced the motors after discovering the front two (spider x) had discolored windings from overheating. Same situation though - flying great for several minutes and then a very quick decent and hard landing. Full throttle (RCIN), but in my case RCOUT C3 (front left motor) was maxed out.
Roger - FreeBirdFlight recommended changes to ATC_THR_MIX_MAX as a possible solution.
I’ve also face similar problem with 3.4.1, What i observed was, When ever there is very fast change in altitude the EKF primary core changes between 0 and 1 falsely at this time the filter breaks out the information about altitude and goes wrong…
when ever i do a constant altitude mission i have good control in alt, but in case of alt varying missions (specifically where the is change in alt is short distance i face this problem)
I’m sure where this perspective is right r not, I’m just sharing what i observed, If some one find solution please share…