Not much untoward to report, tried Alt Hold, Drift, Pos Hold and RTL and except for a few messages in the auto-analysis that I haven’t seen before all was good:
Seems that in Drift mode the severe pitch up after fast forward flight is reduced or not as apparent, will check with FPV if this is the case as it’s very noticeable then, one saw sky for a second as the MR would pitch up dramatically to slow down, this is/was not apparent in any other mode.
Tricopter is my own version, based on RCExplorer’s design but using 3D printed parts and carbon arms. Span laterally is 500mm, 2400mAh or 3300mAh 3S, 10x4.5 carbon props
Good work guys
(.bin attached for perusal)(Well it would be if the forum would take the attachment which it’s not)
OK, some issues have emerged which I don’t recall were present with 3.3.
The first was definitely in v3.3, I thought it had gone away but it is still there:
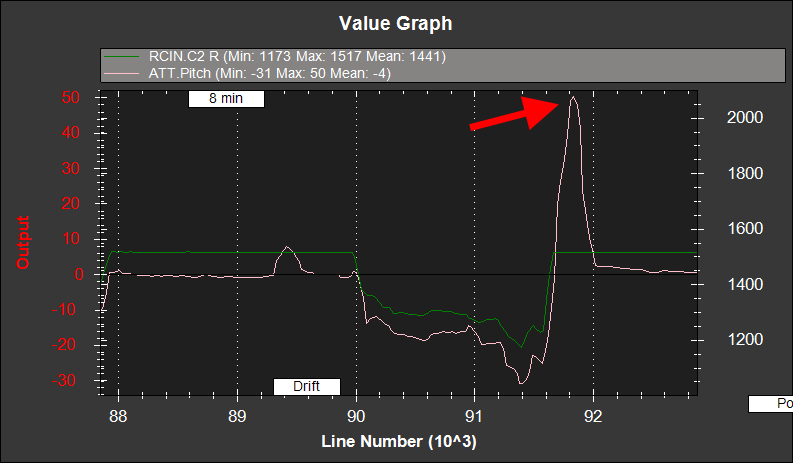
After flying forward quite fast (note my bank angle is limited to 30°) in Drift mode and then releasing the sticks the TC pitches up to 50° to stop! Very clearly shown in the graph below. This does not happen in any of the other modes.
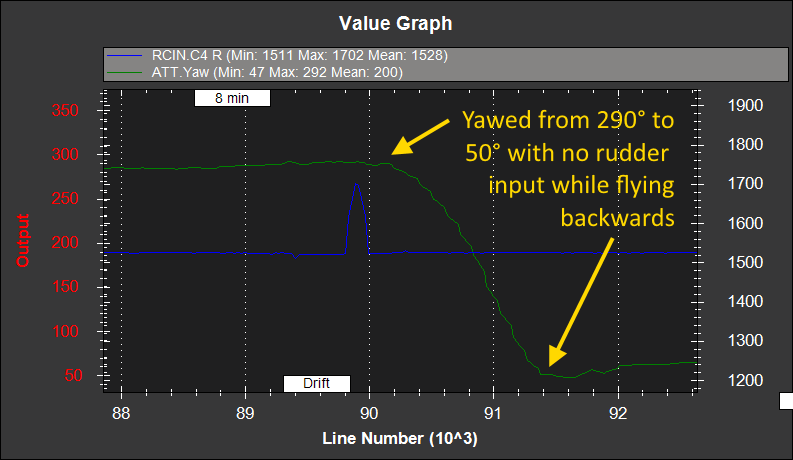
I’ve been getting uncommanded yaw movements in several ‘manual’ flight modes w. 3.4. (Quadcopter) It’s worse w/ a bad GPS. W/ a good GPS and good signal, it’s almost not noticeable, but it is still twitching around yaw a few degrees.
Graham,
We haven’t specifically made changes to address the Tri copter yaw problem you found but a lot has change between -rc1 and -rc6 so if you’d be willing to give it another test flight, I can look over the logs and see if there’s something we can do.
I can confirm that the uncommanded yaw is no longer present. The tricopter maintains it’s heading while flying backwards.
The pitch glitch I saw too seems to be gone, I have not been able to recreate it.
The excessive pitch up however while in drift mode is unchanged, it still pitches up to 50°+ when the stick is released from forward flight.
Good job guys, I had to do quite a bit of re-tuning but it’s flying smooth and precise.
The only other comment I’d make is that the yaw feels very different, with what seems like expo or mushiness when starting and stopping yaw. Will try to fix this over time.