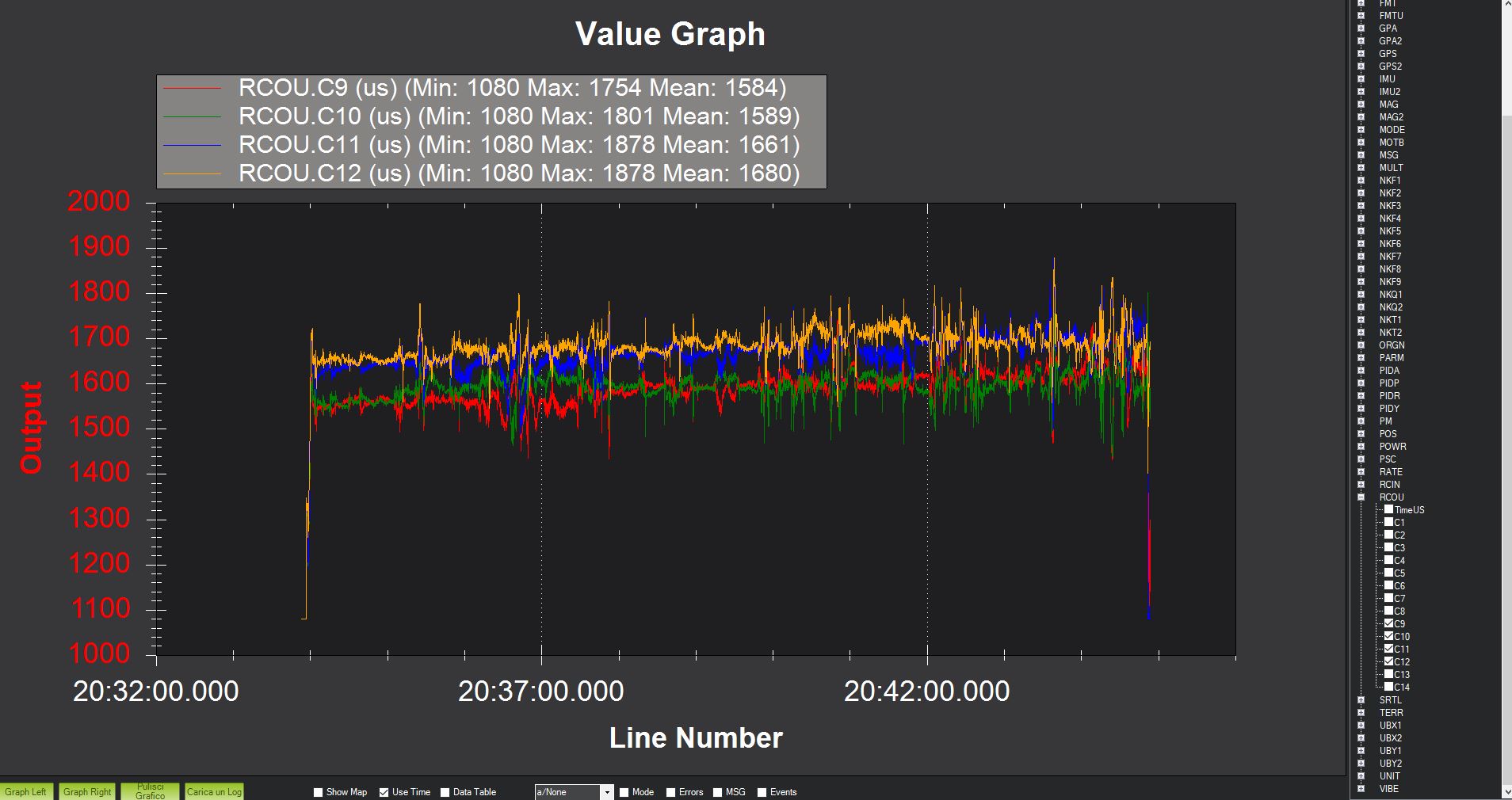
Good morning everyone, I know that this question of mine has already been dealt with previously, but I need help to understand how in the log, mission planner identifies the numbering of the motors. I have 4 blheli32 configured in dshot 150, connected to the pins of the pixhawk AUX 1-2-3-4, now the question is this: looking at the graph of the RCOUT 9-10-11-12 concerning the 1-2-3-4 motors , we understand that the center of gravity is not balanced, but if MP identifies the 1-2 motors normally, how is it possible to have this result? If then MP identifies the motors 1 and 2 as when doing the engine test and that is in a clockwise sequence, then it could be that the machine has the center of gravity shifted to the right. Thanks to those who will help me understand. what do you think is the problem? Have a nice day.
M1=RCOUT 9
M2=RCOUT10
M3=RCOUT11
M4=RCOUT12., OK.
So, if M1 & M3 is higher, copter Front heavy.
if M2 & M4 ,high,copter back heavy.
if M2 & M3, high,copter left heavy.
if M1& M4, high,copter right heavy.
If M1 & M2 (ccw) high, these motors are fighting
an induced Yaw by the other motors (3&4), which are not straight up. (Prop tips won’t point each other).
Thanks for the explanation, so what do you tell me to do?
If ccw motors working harder than cw motors (or viceversa) it does not need to be a misalignment of the motors. I had several cases where the issue was a different geometry of the props. I tested them with the same motor on a thrust stand and the difference was only different thrust of the props (although they were from the same delivery).
In that case, he should check that also.
Ok I will try to check the measurements of the arms and the geometry, and I will do an autotune on the yaw axis, let’s see if the problem is solved. Thanks again
can you post an image of the arm with the motor mount?


slightly loosen the motor mountscrews of motor 3&4 and rotate it clockwise, looking from the outside of the quad (the prop tip should move just 1 or 2 mm).
Do a 1 or 2 minute hover without Roll & Pitch input.
Do a log analysis. If the 2 RC out groups move further apart, rotate the mounts in the opposite direction. Anyway the final result should be 4 RC outs almost overlap in a hover. Trial & Error method!
Good Luck.
P.S. I forgot to add, check all prop tips point each other. In flight at eye level check prop tip follows the other tip.
great idea, I will definitely try to let you know the result. Thank you so much