I’ve set up my RQ-7 model and it flies nicely, but the yaw stick is working “backwards” for VTX configuration (HD-Zero) and rudder arming. @tridge suggested that I might have the servo reversals (and hence rc reversals) wrong, so I thought, I’d go through the setup in detail to help with my thinking process and document it in case it might help others.
The RQ-7 is an A-Tail. The wiki says this : “With “A-Tail” planes (an inverted V-Tail), the control surface movements referenced above should still be the same directions. It is likely that the servo reversal or function will be opposite from a similar V-Tail setup.” which does make me think I might have gotten it wrong, so let’s see.
Here is a picture of the plane:

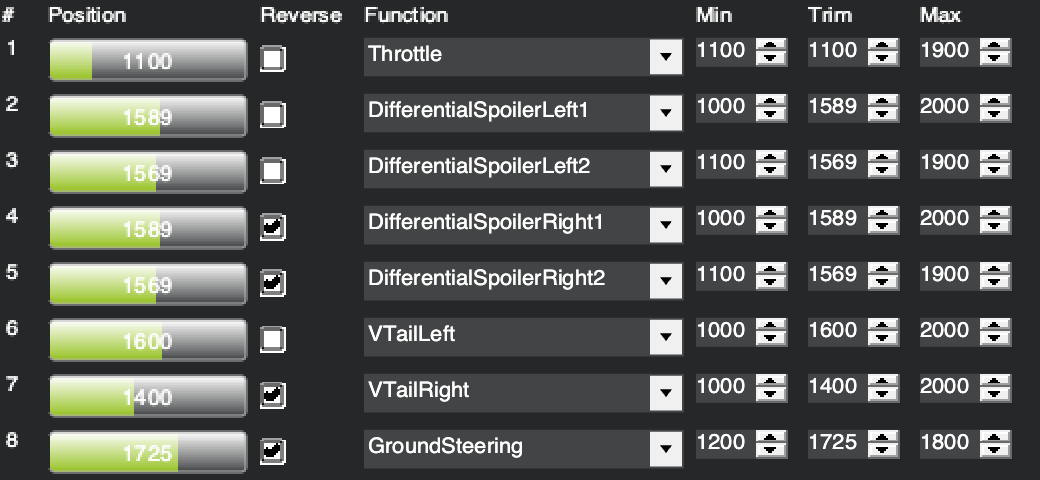
The servo’s are set up like this:
SERVO6_REVERSED = 0 (VTailLeft)
SERVO7_REVERSED = 1 (VTailRight)
Corrected to
SERVO6_REVERSED = 0 (VTailRight)
SERVO7_REVERSED = 1 (VTailRight)
The RC setup is standard AETR on channel 1,2,3,4 with
RC1_REVERSED = 0
RC2_REVERSED = 1
RC3_REVERSED = 0
RC4_REVERSED = 0 (corrected from 1 as per the video below)

I followed the setup instructions on the wiki here V-Tail Planes — Plane documentation which gave me the servo and RC settings you see above. The plane flies beautifully, but. this doesn’t comply with the instructions, specifically this:

What I’m getting is - when I roll the plane, left or right, both surfaces move up. But if I pitch the plane the surfaces move correct (Pitch up - surfaces move down, Pitch down - surfaces move up).
Actually if I follow the instructions for resolving this, it doesn’t really do much. Here’s a short video about that:

As you can see, either way the surfaces are moving incorrectly as per the wiki, just a little bit less incorrectly based on the new configuration.
The good news is that now I can enter the HD-Zero VTX menu using the sticks as I expect and the arm/disarm is working correct, so maybe this is better, but does the wiki need updating @hwurzburg - or do I still have something missing?
I flew this today with VTailLeft on the right ruddervator and TailRight on the left ruddervator and it seemed to fly better subjectively than before. although looking at the log I’m not so sure. Here is a log of a fairly active FBWA flight with this setup on 4.5.2 beta 1.