My original post is misleading regarding PRU setup. The follow-on discussion covers that a bit. It seems the timeframe for editing has passed, so I am unable to update it, but I recommend following the applicable sections of the linked setup guides to enable the PRU. Also recommend sticking with kernel 4.19, as 5.10 proved problematic for me.
1 Like
I did follow read the post’s above and followed Imfantant’s guide for configuring the kernel and enabling PRU and UIO.
I am currently testing the radios with python, they communicate fine on my pc. The blue is not sending or receiving with the radio. (the red led on the radio does not blink.)
I might just redo the setup of the blue, originally It was configured with the 5.10 kernel but i saw the post and rolled back to 4.19.
1 Like
You can compile the pru test program
make test and run the examples to check.
I ran the test and while I don’t quite understand the output, the servo i have plugged in is moving.
update: I got the telemetry radio working. I swapped the TX and RX wires (out of desperality more than anything else,) and for some reason that worked. probably some weird software reason but who knows.
That’s not a weird software thing. RX on one side should be connected to TX on the other unless there is a circuit board labeling inconsistency.
What telemetry radio are you using? I saw a list of options on the ArduPilot docs, but was not sure what is the best approach. Can you please provide some guidance using your setup?
Hi @svanimisetti
for telemetry there are some options, one is wifi ( setting one of the ports to the IP of the groundstation - “-A udp::” or using one of the serial radios with “-A /dev/ttyOX” - where X is the serial port connected to the radio. You can use even a serial port connected to the fport of frsky receivers with a signal inverter.
The only thing is not supported is serial receivers protocols with telemetry - like CRSF .
Just a fly by, but it looks like after completing the bluetooth config section above, ardurover.service will no longer be running the ‘hardware setup’ script before loading.
regarding the “Lua: open directory (@ROMFS/scripts) failed” see param SCR_DIR_DISABLE, particularly the romfs bit
It should also be included that there are mechanisms built in to blue to allow read voltage on lipo plug (ain6) and dc jack (ain5).
1 Like
Thank you for this detailed guide. My question is, can we use the SD card now for logging and running scripts, like other pixhawk hardware (e.g. CUAVv5) ??
If so, please let me know how. Or if there is any other method for storing flight logs.
Yes.
You can automount an sd card and on the ardupilot command line parameter add --log-directory - Startup Options — Dev documentation
1 Like
setup was very easy, the only things I had to do different was change the wifi security type for it to connect and expand the SD card before updating Debian
I have ordered another one. they are too big for aircraft but are ideal for rovers.
I just ran this to show the security type and added that to wifi.config
connmanctl services <OUTPUT-FROM-CONNMANCTL-COMMAND>
where does a RC receiver connect to? That detail is missing from the wiki.
I have found this post asking about enabling CAN, but I’m not sure how to make it work.
are the 4 serial ports mapped?I currently use 4 mavlink serial ports:
MLRS
Drone engage
ESP32
MAVsplitter with motor controllers, lidar, gimbal, AI camera and RTCM.
I could probably use 2 if I ditched RC telemetry and connect drone engage over wifi but i would prefer them wired.
1 Like
Be sure not to connect too big of a battery.
I fried the charger with 2S 18650 cells and a 12V 4A external power supply.
That BBBlue was supposed to go into an AR Wing Pro, so I dropped the project.
1 Like
I don’t plan on using the servo outputs so that’s fine.
I found a nice case for it.
This works to get uart 0 and uart 5 working
to disable Console its
sudo systemctl mask serial-getty@ttyO0.service
sudo systemctl mask serial-getty@ttyS0.service
then edit
/etc/default/ardurover
# WiFi Telemetry
SERIAL0="-A udp:192.168.7.5:14550"
# Radio Telemetry1 (UART1 - "UT1")
SERIAL1="-C /dev/ttyS1"
# GPS1 (UART2 - "GPS")
SERIAL3="-B /dev/ttyS2"
# Radio Telemetry2 (UART0 - "UT0")
SERIAL2="-D /dev/ttyS0"
# Radio Telemetry3 (UART5 - "UT5")
SERIAL4="-E /dev/ttyS5"
/lib/systemd/system/ardurover.service
[Unit]
Description=ArduRover Service
BindsTo=sys-subsystem-net-devices-wlan0.device
After=sys-subsystem-net-devices-wlan0.device
StartLimitIntervalSec=0
Conflicts=arducopter.service arduplane.service antennatracker.service
[Service]
EnvironmentFile=/etc/default/ardurover
ExecStart=/usr/bin/ardupilot/ardurover $SERIAL0 $SERIAL1 $SERIAL3 $SERIAL2 $SERIAL4
Restart=on-failure
RestartSec=1
[Install]
and I now have 4 mavlink ports!
1 Like
aaaaand i snapped off the micro usb port… its very delicate and only surface mounted and I bent the connector when fitting it into the case. I just need to use a usb uart if i need to set it up again.
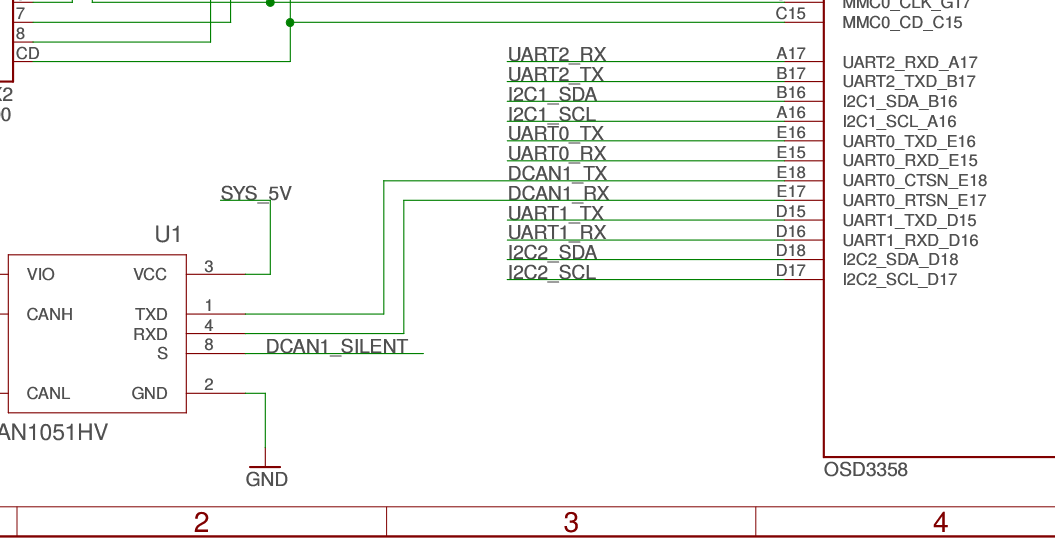
I have been struggling to get CAN working, am i reading this correct that the CAN port is connected to UART0? I might have to get creative with the serial ports.
do you think this would work on it for monitoring the operating system while Ardurover is running?
It looks like the CAN port repurposes UART0’s flow control pins.
It would then reason that someplace in a definition file, you can either enable UART0 flow control or CAN, but not both.
1 Like
ok so you think its just using the flow control pins and not the actual port uart0?
I have it in my rover, i found enough wire in my spares box to get the esp32 and mavlink splitter connected, i have the wheels moving, I still need to figure out RC and CAN but i need wires to arrive first.
That’s how it reads. Pins E17 and E18.
1 Like
I just mean is it going to disable uart0 if I use it?
I don’t think so. But I don’t know so…
1 Like