The main thing that helped is increase spin_min up to around 0.1~0.12 (and with it, I have tried thst_exp of 0.3~0.1).
I think I confused which setting I needed to hit to disable the batch sampling. I thought it was log_bat_opt[0][ but is it actually log_bat_mask[0]? Do I need to re-collect with this off?
So I think what I should do is get a log where I replicate the sound clearly, have the 100Hz filter and the FFT doesn’t show a huge 174Hz noise spike. And if I do replicate it, I’ll try 50Hz filter. Does that sound like the right step?
I’m like 90% sure I remember this log (where I have a lower mot_spin) fits the profile with 100Hz filter, but I’ll get a fresh run later just to be certain.
This may also be an ESC issue at low throttle. I am trying to work out if we get this problem when we make the PID’s incapable of commanding or reinforcing that grinding problem. If we can then it is unlikely that it is primarily a tuning problem. It could be:
communication problems
autopilot timing problems
sync problems (BLHeli settings may help)
ESC electronic noise problems.
You may have done other tests that make some of these options unlikely.
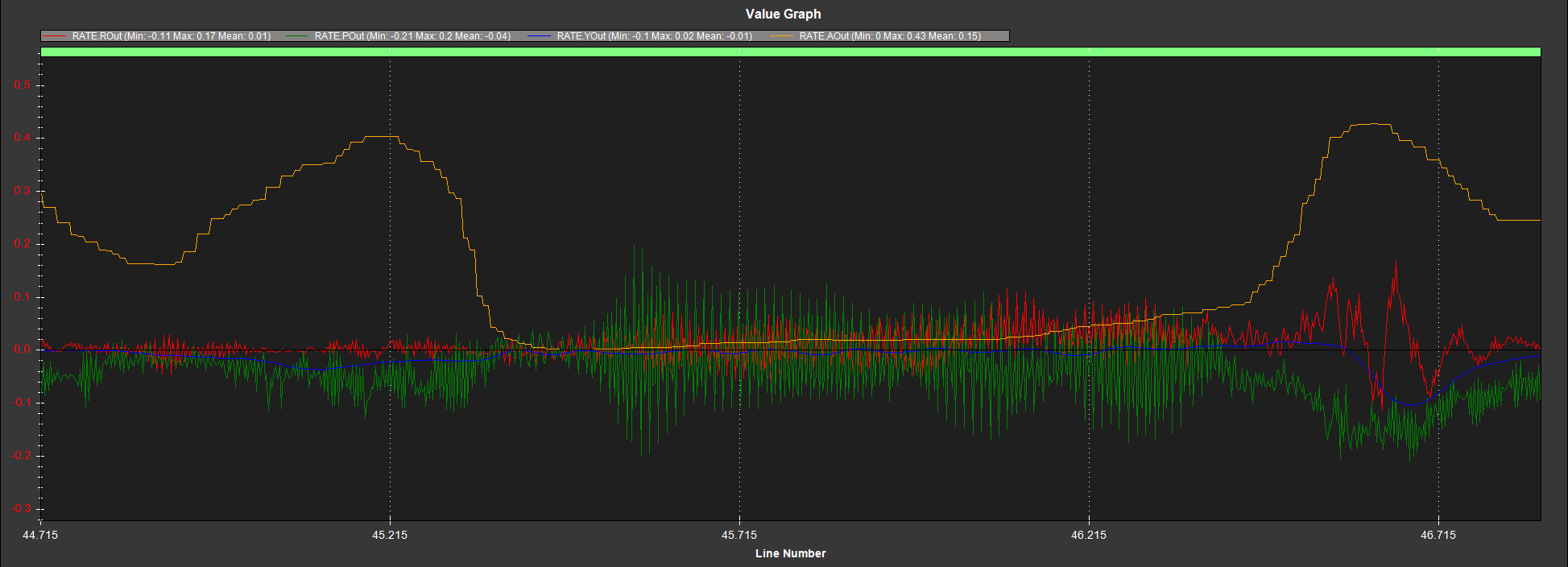
I got a log with 100Hz gyro filter, and with spin_min = 0.06 (instead of 0.1) and thst_expo = 0.6 (instead of 0.3). Definitely get that grinding sound and I see the oscillation in the rate log.
Attached here (3 logs since I tried a few runs). The grind is mostly gone (it popped back up for a moment when I was moving the quad in stability mode but I wouldn’t be able to pinpoint it in the logs) and the oscillation at low throttle also seems to be gone.
However, motors are still starting to get hot after just a small period of testing low throttle like this (much hotter than when I fly normally)
spin_min = 0.1, exp = 0.3, the oscillation comes up at 150Hz filter, but not with 100hz and 50hz
spin_min=0.06, exp=0.6, oscillation shows up with the 150Hz and 100Hz filter, but not with the 50Hz.
But even if it’s not as obvious, motors seem to get quite hot in the testing… not sure if it’s related or something else.
Forgive the slightly off topic, but I saw this and had a good laugh. And saw a couple more posts about crashing and disarming to land, etc.
I’ve been flying mostly 3" copters for the past few years now (I know most of you know that, heh). Even using them for mapping, photogrammetry, 3d models, etc. Working out great. (Just need lidars to miniaturize now)
I just got back from camping in the mountains for a couple weeks. Lost my video one time and cut the throttle in mid air, over a valley. Copter had to have fallen hundreds of feet down. Maybe even hundreds of meters. Found it (using signal level as a guide). Took off and kept flying.
Huge benefit of the smaller copters! Especially w/ the battery on the bottom. They just fall flat and level down onto the battery. I’ve had similar crashes a bunch of times w/out any damage.
-edit to mention, I took off before GPS lock on this particular flight, which is why I couldn’t have it fly itself home… Something I almost never do. And the one time I do fly w/out gps signal, of course I had an issue
That sounds quite amazing; what does your setup look and (and what frames do you use)? What are your tricks for getting around interference on the compass and GPS? Also curious, why cut throttle instead of using RTL?
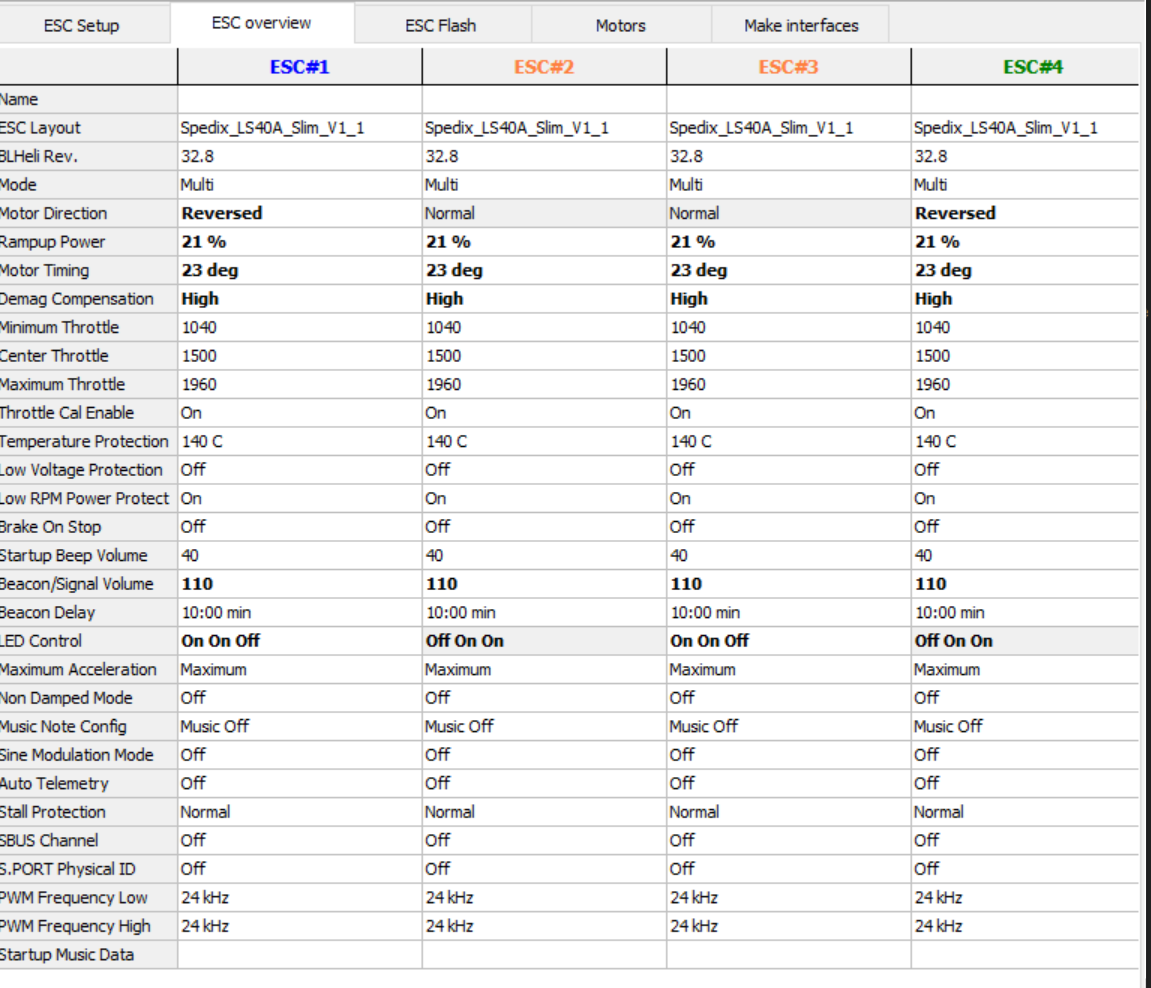
There is a chance that this may be caused by ESC setup being a little sensitive. I would do a test to see if motor timing reduces the severity of the problem. Ramp up power can also play a part if you are getting down into desync problem range.
Oscar Lang also makes suggestions to use higher PWM Frequencies but I have not played with that myself.
I’ve been using some flexRC frames… Skydiver and komori. Both modified… I cut away some extra decorative things he has on them. And I add some extra carbon fiber to the bottoms of the arms to stiffen them.
Interference was a challenge… But really just everything you should do anyway. Twist wires (except for the ones that shouldn’t be ). Keep signal wires away from power. Added capacitors to both the battery input at the ESC, and at the 5v regulator on the FC. Copper shielding tape under the GPS. It’s not perfect. I require 10 min to get GPS lock under the best conditions. But it’s always fine once I take off.
And because of that 10 minute GPS wait… I sometimes fly w/out gps lock. Which is what I was doing when I lost my video and cut the throttle to cause a very fast landing. (edited my above post to mention that).
Started a thread about it long ago here: MicroArduCopter, 3" props, Omnibus Nano, Success!
But… Not even sure it’s worth reading anymore, so much has changed… Andy got involved, and really improved things, but all of that info is spread out in a bunch of threads in the copter 4.0 section.
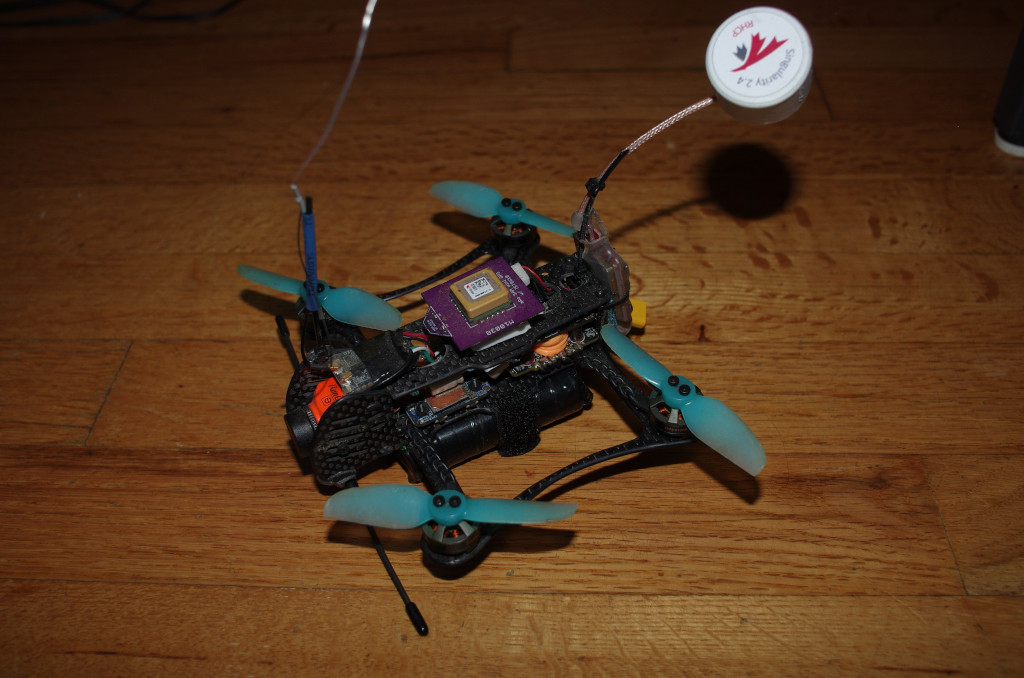
Here’s a pic… This one is 2.4ghz video, just to show a microcopter w/ 2.4 :). But I usually fly 5.8. Sometimes I hang extra cameras off them when I use them for real work. Usually little runcam split type, but I have carried bigger action cams on these tiny copters when I needed.
Thanks for asking about it! (But I’ll try to not take your thread OT anymore.)
-quick edit to mention, this one has 18650 batteries, and I get about 18 minutes flight time, but can’t punch it and go fast. I usually use some smaller lipo’s and get between 6-7 min flights… And can fly over 100kph w/ those.
I’ve read that I should lower the ramp-up power if I’m at risk of desync… is that the direction you would recommend? I’ve played with this setting before and if I go much lower (say down to 15%), I can see the the slow-ramp when I arm the quad.
I’ve stayed at lower PWM frequencies because I believe it had caused some de-sync or motor error issues in an older quad with 48Khz, but I can try 48Khz as well.
Thanks for sharing! That discussion is like a 1k posts of hidden gold. I’m enjoying reading through it so far. Also, omg why didn’t I think of copper tape.
I can’t offer much more advice over what Oscar Liang gives here. I have done a lot of work getting reliable ESC operation on a 10 inch racer but a few things have evolved a little sinse then.
But it is worth checking to see if there is an ESC setting that is contributing to the problem.
I got distracted the last week and got to test this today with 0.06 spin_min, 150Hz gyro_filter, 70Hz flt_D.
Though it didn’t help with the grind/oscillation, I learning something from playing with the ESC settings. It seems increasing my PWM frequency from 24Hz to 48Hz reduces how hot my motors feel after testing for the grind. Dropping motor timing a bit (23 -> 21) also may help with the heat a bit though that was not tested enough to say for sure.
So I tried the last thing on my list: take the one of the approximate autotune results with 150/70/70 filter and drop them manually. So
Roll: 0.13/0.13/0.025 -> 0.1/0.1/0.02
Pitch: 0.14/0.14/0.028 -> 0.1/0.1/0.025
Yaw: 0.35/0.35/0 -> 0.25/0.25/0
This helped reduce that grinding/oscillation (and double checked it was with 150Hz GYRO, 70Hz FLT_D), and I can confirm this by testing previous PIDs. I should narrow down if it’s YAW or RP next, then I’ll go fly a bit.
Thanks very much for sharing your PARAMs. I’m at a point where I can try comparing my PIDs against this and tweaking mine a bit. For example I’ve been keeping P/I locked together but maybe I should toy with increasing I.
I got a question I couldn’t find an answer through a few minutes of search… I found a setting “AHRS_GPS_GAIN” that is used to control how much GPS is used to estimate attitude and “AHRS_RP_P” that controls how fast accelerometers control attitude.
Is the former always disabled in acro and can one ‘tune’ the latter? When I fly in a straight line, I see small vibes that I just can’t seem to tune out with PIDs or filters.
AHRS_RP_P related to translating the pilots input, it won’t affect the tune. If the vibes are at either maximum or minimum throttle that is an indication that MOT_THST_EXPO is wrong