I didn’t want to spam your awesome thread on a LR 7" build with this. I flew my H743 build (Iflight 4-in-1 ESC and Xing 2806.5) with some of the scheduler/loop rate/gyro rate settings from your post along with BDSHOT enabled. I got it to feel pretty good but still found similar items that I had on my F405.
I found that I still need to go with a higher spin_min (at least 0.1), low mot_thst_expo (down to 0.1) to push performance (for my flying style) and improve propwash handling during descent. Higher most_thst_expo causes vibes at low throttle. I watched your acro flight and I noticed your throttle does tend to be above hover, but you did notice there’s heavy vibes in RTL when throttle drops. Does that seem similar to the behavior I’ve been seeing?
For this H743 build, I also found there’s some yaw offset injected when I bump throttle in acro; not sure why yet. The battery plug does come out the back near the compass/gps and I didn’t get a chance to check for compass interference like your did, but I wouldn’t expect compass/gps to do anything in acro mode. Maybe it’s interference from the IMU that I need to look into.
Also very neat that you have a setup to find frame resonance; I’ve also found from flying that I could benefit from a static notch around 168Hz.
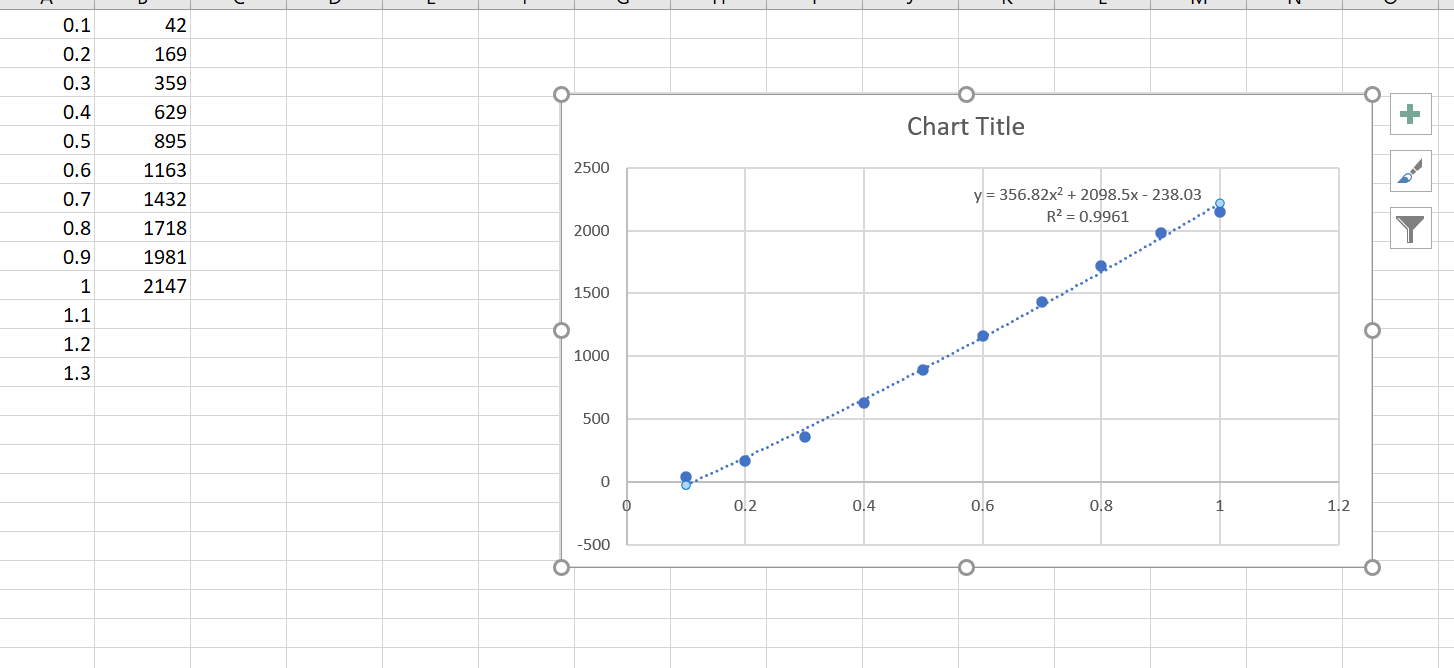
So this isn’t my motor (2806.5 Xing/Brotherhobby) or my prop (7035), but I pulled a thrust chart from a 2806.5 running 7056 props 6S and the ESC % vs thrust looks more polynomial than exponential starting at 10%.
Thrust expo is not actually an exponential it is a polynomial based on:
(corrected formulae)
Thrust = Thrust_Max * ( (1 - expo) * x + expo * x^2 )
In your case the expo looks low because your thrust is dropping off at higher rpm. This may be due to the propeller stalling or the motor staturating. I have not been able to do thrust measurments in a wind tunnel to work out how best to characterise this effect.
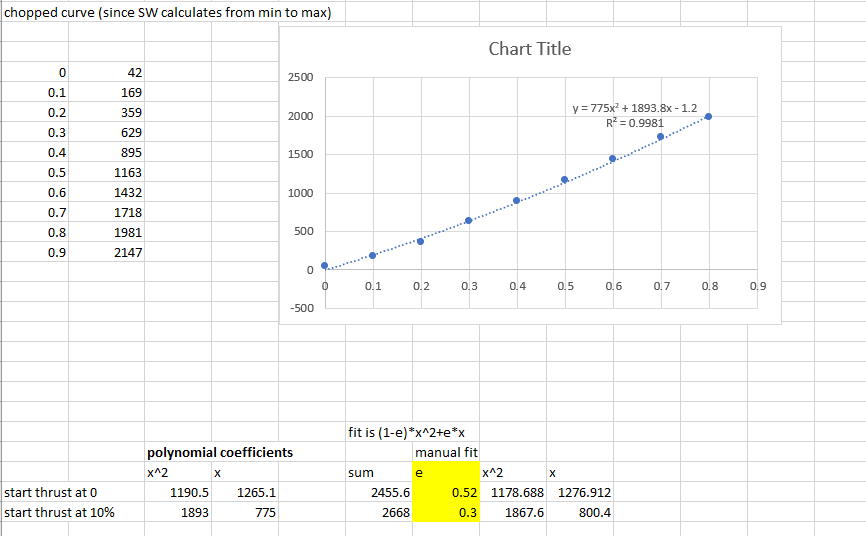
The way I handle this currently is to base the expo on the first 80% under the assumption that in normal flight the propeller will have more inflow and will not saturate as it does in static tests.
Thanks Leonard. And the thrust_max is the range of thrust from spin_min to spin_max (so if thrust chart is 42g @ 10%, then if I set spin_min to 0.1 then 0% in arducopter is 42g)?
If run the fit from 0.1 to 0.9 just to approximate this, I seem to end up with an expo of 0.3 (noting again, these are not my actual quad motors+prop… but I do have a set of the props they tested so maybe I can give this a try)
That looks right. Keep in mind that at the upper end you may start to see propeller stall or deflection that artificially flattens the curve. If you did the fit using only the points to 50% you will probably find the expo is higher.
It is this trade-off that I have not made any solid decisions as to what is the best approach.
In my excel I accidentally mixed x^2 and x coefficients labels but my formula matches yours. lower e gave more x^2. I’m on my phone so can’t correct it until later
I suspect your formula in the comments is a typo? If so then two wrongs made a right =)