I’ve been using some flexRC frames… Skydiver and komori. Both modified… I cut away some extra decorative things he has on them. And I add some extra carbon fiber to the bottoms of the arms to stiffen them.
Interference was a challenge… But really just everything you should do anyway. Twist wires (except for the ones that shouldn’t be  ). Keep signal wires away from power. Added capacitors to both the battery input at the ESC, and at the 5v regulator on the FC. Copper shielding tape under the GPS. It’s not perfect. I require 10 min to get GPS lock under the best conditions. But it’s always fine once I take off.
). Keep signal wires away from power. Added capacitors to both the battery input at the ESC, and at the 5v regulator on the FC. Copper shielding tape under the GPS. It’s not perfect. I require 10 min to get GPS lock under the best conditions. But it’s always fine once I take off.
And because of that 10 minute GPS wait… I sometimes fly w/out gps lock. Which is what I was doing when I lost my video and cut the throttle to cause a very fast landing. (edited my above post to mention that).
Started a thread about it long ago here: MicroArduCopter, 3" props, Omnibus Nano, Success!
But… Not even sure it’s worth reading anymore, so much has changed… Andy got involved, and really improved things, but all of that info is spread out in a bunch of threads in the copter 4.0 section.
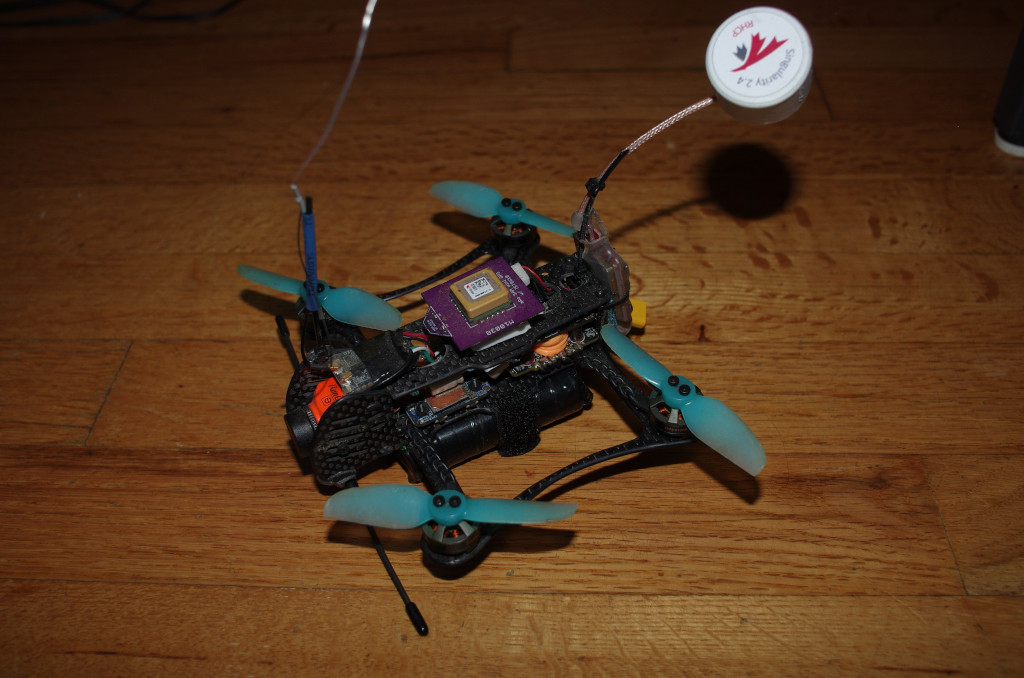
Here’s a pic… This one is 2.4ghz video, just to show a microcopter w/ 2.4 :). But I usually fly 5.8. Sometimes I hang extra cameras off them when I use them for real work. Usually little runcam split type, but I have carried bigger action cams on these tiny copters when I needed.
Thanks for asking about it! (But I’ll try to not take your thread OT anymore.)
-quick edit to mention, this one has 18650 batteries, and I get about 18 minutes flight time, but can’t punch it and go fast. I usually use some smaller lipo’s and get between 6-7 min flights… And can fly over 100kph w/ those.