Me and my team are developing a 7 inch drone with a custom 3D printed aerodynamic shaped fuselage that in some way is similar to the DJI FPV drone. Since the begining of the development we have been dealing with a problem that consists in the drone losing control during the braking maneuver at 70/80 kmh.
Initially we had a problem with the CG being too far back which made the problem even worse but it has since been corrected.
The drone flies pretty good despite this problem. It is very stable and FFT shows almost no vibrations after filters.
We believe the problem may be related to PID tune but after many autotunes with different filters and aggressiveness we can not find a tune that completely solves this problem.
If someone has any ideas I would be very thankful. We have already tested many parameters that were suggested in other discussion but could not solve the problem.
Edit:
Forgot to describe the hardware on the drone
Motors Xing 2806.5 1300kv
Battery 5000mah Liion 4S
ESC Tekko32 f4 metal 4 in 1 65A
FC Kakute H7
Prop Gemfan 7035 biblade
Is you motors spinning stable at 1080PWM ?
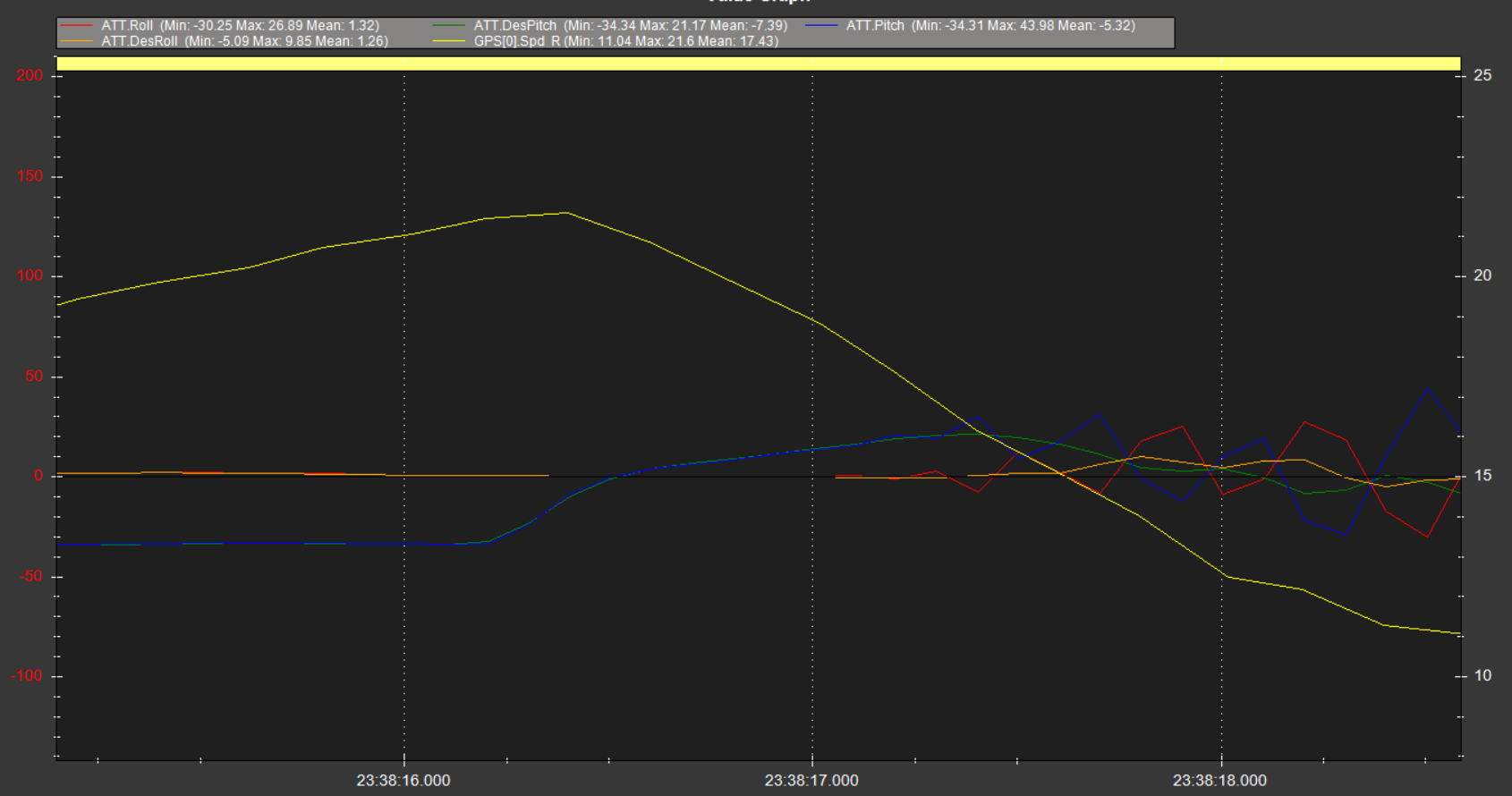
The I see only one log, but at the beginning of the instability, motor1 goes down to 1080, then start oscillating between 1950 and 1080…
//Correction, motor1 goes low to 1080, then starts oscillating, motor3 tries to compensate,
There is no instability associated with the speed or even slowing. The instability only comes half way through slowing one time. There are multiple tests in this log that do not suffer the issue.
Since motor outputs go quite low during stages of this manoeuvre I’m wondering if the lower battery voltage after several attempts is allowing the forward movement (airflow) to prevent the motors from responding properly to commands.
You could try raising MOT_SPIN_MIN,0.10 or 0.12
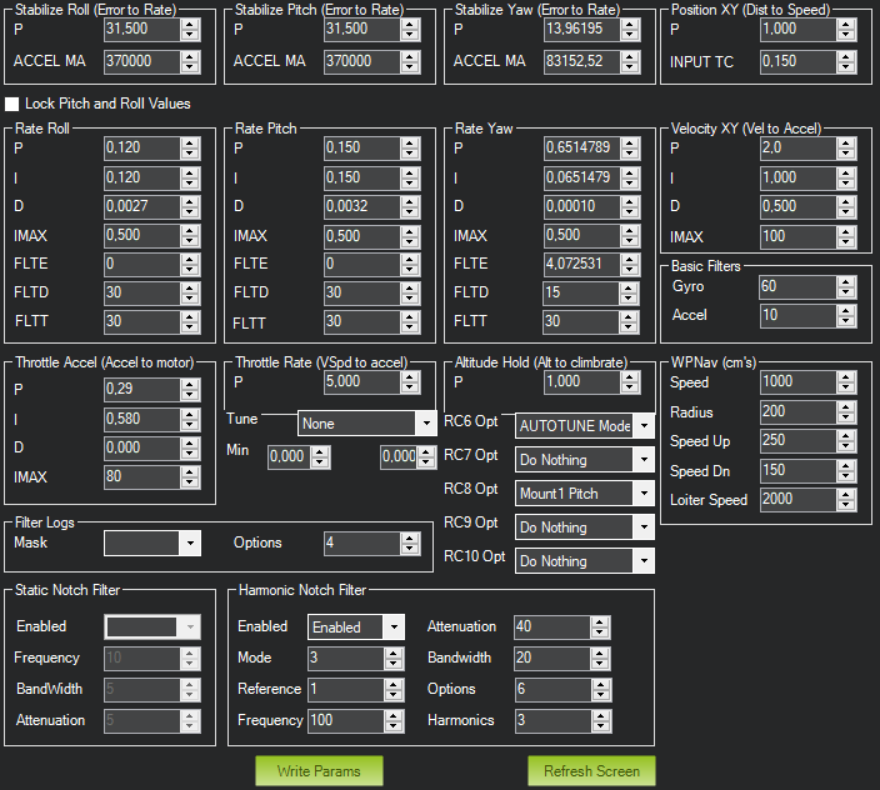
There is excessive notch filter configuration and I suspect this could also affect the PIDs with extra lag.
Definitely disable the FFT and second notch - not required at all !
FFT_ENABLE,0
INS_HNTC2_ENABLE,0
Adjust the ESC RPM based notch as follows:
INS_HNTCH_FREQ,100
INS_HNTCH_BW,20
and do another test.
Also what are your BLHELI settings in ESCs? Is Low Voltage Protection = OFF
That seems like a good point. I will increase MOT_SPIN_MIN and try again.
I have the second notch enabled because it removes a strange noise at around 120hz which I suspect might be frame resonance. If I don´t get rid of that noise peak there is a noticeable vibration sound on the motors.
I set these to the same values of @andyp1per chimera so that it also tracks the noise at lower RPMs. Should I increase to the ones you mentioned?
Yes it is OFF
I feel like I need to also mention that I had to reduce ATC_ANG_P values manualy because autotune gives me a value around 25 for pitch and roll and with those values the drone starts shaking like this during the braking maneuver but at much lower speeds (around 40 to 50 kmh). It is almost like lower ATC_ANG_P values disguises the problem but don’t solve it.
You have responsive altitude control in Loiter with only those settings and no other parameters changes?
And for sure disable the Dynamic FFT notch. Not the way to address a fixed frame mode if that’s actually present.
No . I had to increase
PILOT_ACCEL_Z to 500 cm/s^2
PSC_JERK_Z to 10
Can you tell me what are the correct parameters to put a fixed notch at 120hz? I don´t know what to select for
INS_HNTC2_REF
INS_HNTC2_OPTS
INS_HNTC2_MODE
I can´t find info about fixed notch in the wiki. Some users say I have to set
INS_HNTC2_MODE 0
INS_HNTC2_REF 0
and others say
INS_HNTC2_MODE 1
INS_HNTC2_REF 1
Presumably you are using the Filter Review Tool. It can easily guide you for the settings you want and indicate their apparent effectiveness. This would produce a fixed notch at 120Hz with a BW of 20Hz. Can’t say if that’s what’s really required for this craft.
Ok. Thanks. At least I know now how to set a fixed notch. I will fly again with the first notch only (esc telemetry notch) and check FFT and then set the fixed notch if necessary
Btw this log file is the reason that I need a second notch filter. After autotune with the settings you recommended sometimes the drone enters a vibration state where I have to land immediately. It is at 90hz and not 120hz as I mentioned previously… sorry about that. This is what I believe to be frame resonance but not sure.
Make another hover flight in AltHold with the PID’s you have now for a minute or so. Disable the FFT dynamic notch and disable the FFT function before doing so. Also enable Fast Harmonic Notch logging for the Log bitmask.
Ok. Here is the log. 1 min hover with FFT_ENABLE 0 and Fast Harmonic Notch logging
However, I had to use the static notch at 90 hz with BW of 20hz otherwise it would be unflyable due to vibrations.
Edit: Now there seems to be a noise peak at 130hz… I see no relation between 90hz and 130hz noise peaks but they appear in the pre filter fft. This is why I had the second notch dinamically driven by FFT with the FFT_OPTIONS 1 (enable post-filter fft)