MP is not the tool to use. This combination of ESC Telemetry and a Static Notch by estimation seems to perform well. You will have to actually test it of course.
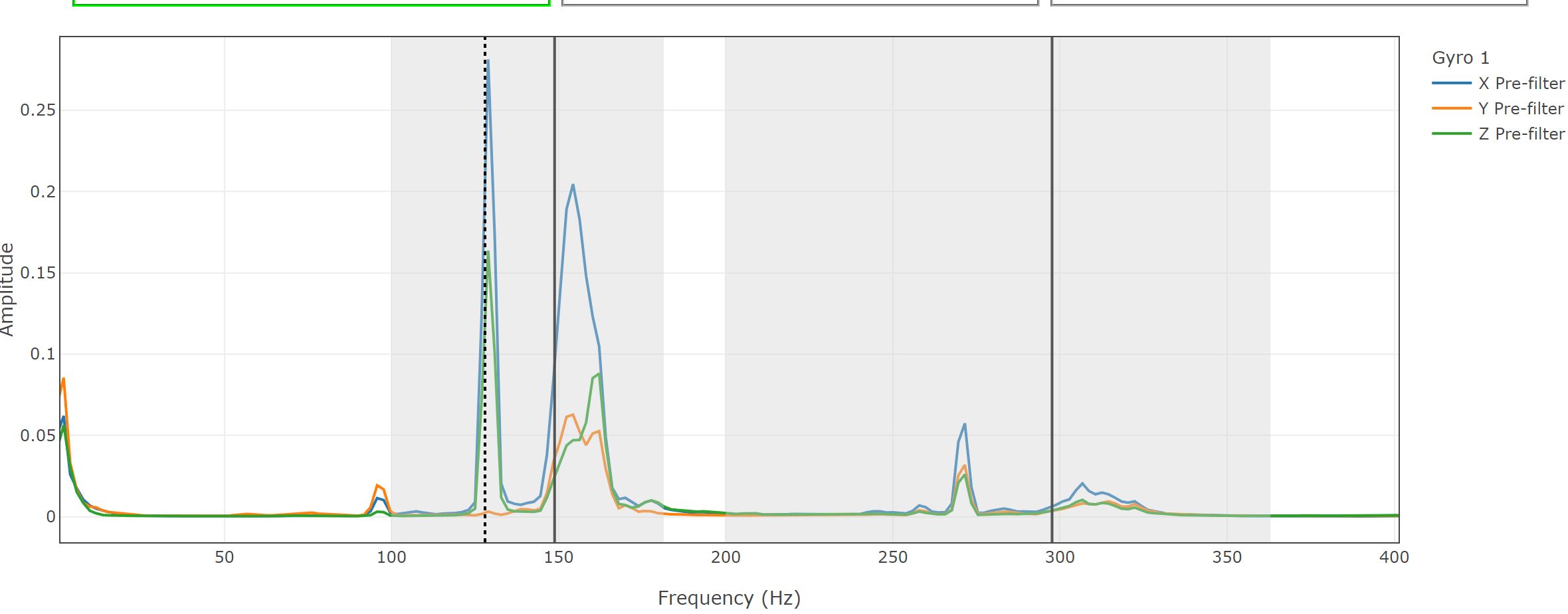
Pre-filter:
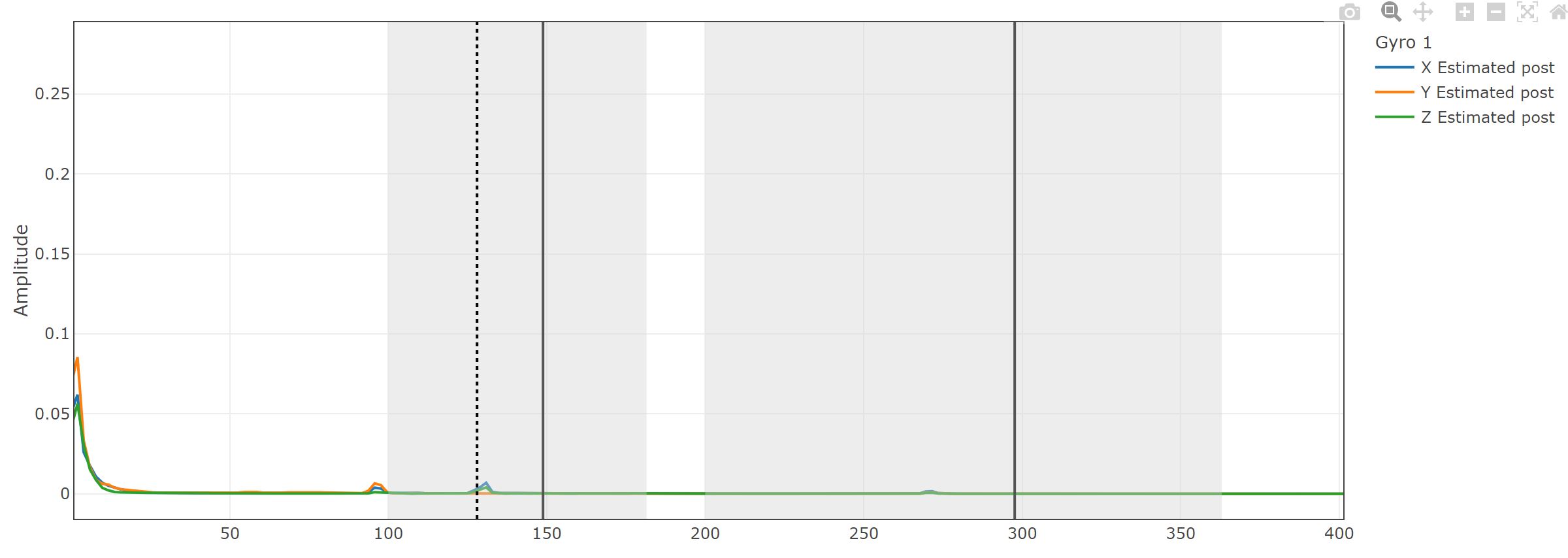
Estimated Post filter:
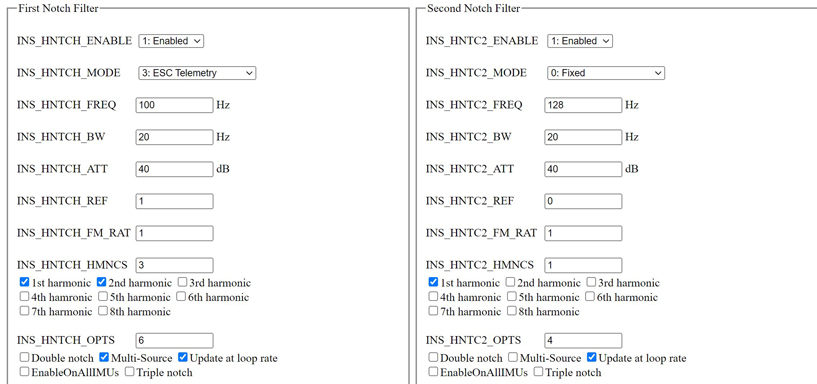
Config:
MP is not the tool to use. This combination of ESC Telemetry and a Static Notch by estimation seems to perform well. You will have to actually test it of course.
Pre-filter:
Estimated Post filter:
Config:
Coincidence or not, while I waited for your answer I already tried exactly those parameters and it has been flying ok in hover.
I will try to tune YawD and then provide a hover log.
Do you think all these changes will solve the braking loss of control problem?
Ok. YawD is tuned and here are the logs. The “dynamic flight” log is just some “agressive maneuvers” with the sticks in althold in the small space I have to test here (around 20x20 meters area)
Hover log: 9.19 MB file on MEGA
“Dynamic flight” log: 4.89 MB file on MEGA
@dkemxr what do you think about the tune? I would also like to know your feedback @xfacta and @andyp1per if possible. In order to avoid a new crash, I would not want to try fast flights again without your opinion on this PID tune because you guys have much more experience than me and maybe can spot something wrong before I try fast flights again. Once again thank you all for your attention
Tune looks OK. Each log you post shows something different in pre-filter. These don’t show that mode at all that the fixed notch was addressing in the previous one. You can disable the fixed notch in Estimated and it makes virtually no difference.
That is what is strange. The vibration does not appear always but when it starts, if I don´t have the fixed notch, it becomes unflyable and vibrations go to 40 or even higher.
I have 4 drones built exactly the same way and all show this behaviour. Tried also different propellers but the same thing happens.
@Leonardthall sorry for bothering. I feel that your input on this discussion could be quite valuable aswell if you have the time. Thanks in advance
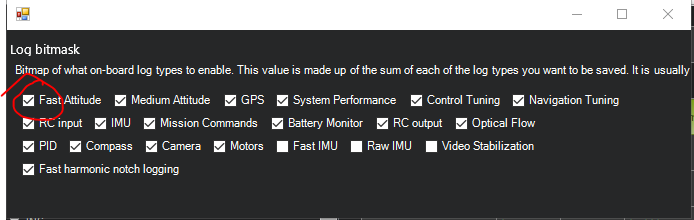
I would need to see the problem with fast logging on:
These are very high:
ATC_ACCEL_R_MAX 370000
ATC_ACCEL_P_MAX 370000
I would use 108000
Do you mean a hover log with fast attitude on or another log where the braking problem occurs with fast attitude on?
In case you mean an hover log here it is:
I also think so but it is what autotune gives me. Also ANG_P values of 31 seem too high for me but not sure.
Also, why did you suggest 108000 value? I am not against you but just to remind that value is lower than the initial recomended settings for 7 inch.
I would need to see the breaking problem.
That is the medium value. An average 7 inch may be able to handle higher but you probably don’t need it. An your aircraft isn’t an average 7 inch.
You can drop them down to 12 to 16 if you like.
Ok from now on I will try fast flights with fast attitude on and if it crashes again I will provide the log. With the changes that we made I hope it doesn´t crash ![]()
I will also lower ACCEL values and ANG_P values as you suggested.
Yesterday I tried flying with the new parameters and the drone behaved very well. Managed to brake safely from 96km/h without oscillations or loss of control.
I did a flight with my “normal loiter” settings that only achieves 70km/h and another with “fast loiter” settings that achieved multiple times 90 plus km/h.
I will leave here the logs and videos of those flights and if you guys have time I would like to know if there is any aspect of the tune that I could/should improve. From what I analysed from the logs it seems that pitch is more “locked in” than roll, i.e, Pitch Rate follows the Desired value better than Roll. Should I increase roll rate PID gains or should I leave it? I am “scared” that I get loss of control again.
Normal loiter log: 86.02 MB file on MEGA
Normal loiter video: 1.79 GB file on MEGA
Fast loiter log: 123.38 MB file on MEGA
Fast loiter video: 2.61 GB file on MEGA
Nice, one more user that got the calibration procedure right, one more proof that the software is not lacking any features once you configure it like is is meant to be configured.
Thank you for not talking shortcuts
Really great to see this,and the support from Ardupilot + Shaun,Dave and Leonard Hall is amazing,just need to do couple more things on my Hexsoon then I think I will build a 5 or 7 incher
Thank you! It took many hours learning the software and experimenting. I still think there is margin for improvement in this tune but for now I am happy that the drone flew well and did not lose control like before.