I think its shows up after 4.2.0 I noticed it in the five range… Can you you test with 2.07. take off in Stabilize fly it to make sure it smooth then into Loiter. this is what i need to see if you can.
.
That’s not making much sense. 4.2.0-dev is the latest Master/Dev version. I suppose you mean 4.0.7? No, I’m not going to test that. 4.1.0 beta7 would be the minimum Rev I would run today.
Agreed, that’s nice tuning and nothing wrong at all
2 Likes
It was a bit eye opening because I had ANGLE_MAX at 75° for the speed Mission runs I was making. But Loiter takes advantage of that! It’s like flying in Stabilize with position control. I have to get used to that experience actually, quite new.
2 Likes
just looking for : ArduCopter V4.1.0-beta7 (96936aa4) stabilize to loiter nothing else.
1 Like
This is the version I think we are to test for Randy. : ArduCopter V4.1.0-beta7 (96936aa4) is this what you tested today or yesterday? I made a typo before. if this is not the version the information is not really valid right?
1 Like
Small update : ArduCopter V4.1.0-beta7 (96936aa4)
seems to reduce most of shakes in GPS mode now so I ready to move on this issue firmware or mechanical after two weeks of hunting bugs. But thanks for the help.
1 Like
Hi Quadsours,
It WAS more of an issue in LOIT mode, but going through the tuning page completely solved all the issues. It flys absolutely perfect in LOIT mode now. I started by turning down the D only setting of the PID which was absolutely the wrong thing to do. Once I went through the tuning page in in the link below, STEP BY STEP, and setting everything as specified, I had instant success !
https://ardupilot.org/copter/docs/tuning-process-instructions.html
1 Like
very cool Mine seems to be flying better as well now It was super hot and dry the last month.
Yea, I don’t think there are any bugs. Most likely just tuning issues as Michael found. I haven’t noticed any changes in Loiter performance in many revisions. There is now in Master though which allows for very steep attitude angles with good stability at speed. I suppose this will be merged to 4.1 stable when it’s released but not sure.
1 Like
Naturally your not going to see any new bugs if you not testing the same current firmware we are. i.e the latest development version, the point of the in flight testing.  Normally if stabilized is smooth GPS is as well anything else is counter to building quads. In the 3D world we use with called Plug ins SDK tools that enable things like specials modeling tools they are very important but the plugins do not change common functionality of the core of the program and used as a choice. As a firmware tester for CNC manufacture part of my job is to keep new changes as an elective Why? because some changes can destroy a lot of work this partly is why we test. my 2 cents.
Normally if stabilized is smooth GPS is as well anything else is counter to building quads. In the 3D world we use with called Plug ins SDK tools that enable things like specials modeling tools they are very important but the plugins do not change common functionality of the core of the program and used as a choice. As a firmware tester for CNC manufacture part of my job is to keep new changes as an elective Why? because some changes can destroy a lot of work this partly is why we test. my 2 cents.
Still don’t think there are any bugs in 4.1.0-beta related to Loiter.
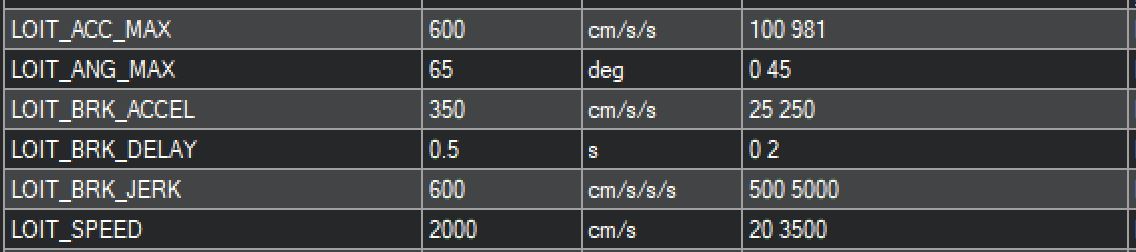
But this is in Beta7 which is cool:
a) Attitude and altitude control changes to support higher lean angles.
1 Like
it seems to be better now in Beta7 come test with us.
1 Like
That would be fun!
I was looking at the 4.0 Issues list and there is one that says:
loiter-to-alt moves too quickly (4.0 issue) (code)
I’m not sure what this is but perhaps there is still something under investigation.
1 Like
Very cool I have a HFrame that i could test this on.
1 Like
I just tuned up a 4" from 3S to 4S and am giving it a go in a few minutes.
Wow! With these parameters Loiter is quite snappy
2 Likes
Decided to try it one more time next stop is to fall back to Beta 2. keep the sound turned up you can hear the motors pitch once in GPS.
1 Like
Yea, I can hear that. Post the log for that flight.
FC?
Props?
Battery Power?
Roger that I’ll get something…
1 Like
Yeah! You can definitely hear the difference. I’m very interested to see that log too.
Not saying this is necessarily related, but what BLHELI settings have you go, if using BLHELI ESCs ? Just to get the whole picture.
1 Like