Hi,
I would like community to share Your configs for 5inch quad X. It would be helpful to me to see what settings people are using. I am migrating from betaflight and default flight performance on arducopter is horrible. I am using Mark 4 5 inch frame + 2750 kV engines. I would appreciate some configs of people who also own this frame.
I think your engine is to much for 4s , i was also do that on 2700kv at martian 220 frame and result is 2 batter going with god i was tuned not very much like I don’t have ESC telemetry to filtering some notch filter , but anyway it’s work Maybe
I have a 4" and a couple 5" quads flying well (had a 3") and as @andyp1per suggested start with the tuning guide rather than someone else’s parameter file. It will be better in the long run to understand the parameters that make a difference rather than copying another.
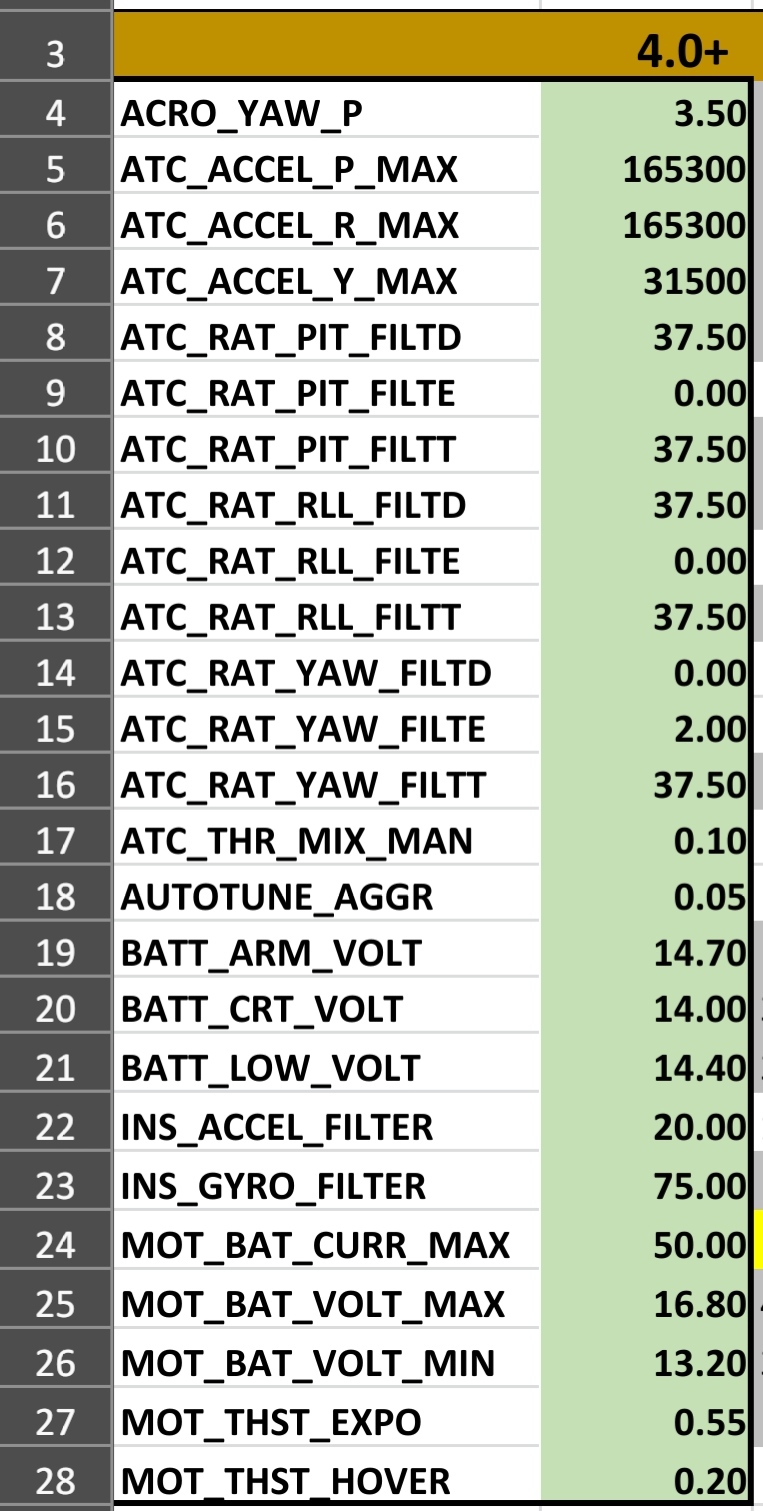
Yes, thank You for links.Excel doc posted by Moksh is cool, however it summarizes tuning process. I already have all those parameters set. Now I want to improve pids to get performance similar to betaflight. I will try autotune soon. I did not have time to do it yet.
So config parameters of ether 5 inch quads could be a reference.
I am not sure of ardu will be as stable as BF because in BF I think pid has some feed forward feature.
Plz don’t do that ? , If you do this direct autotune then will be your motors and battery fire up quickly like only 1min or less
See here’s the think you have blheli_32 ESC or blheli_s but gives telemetry output so flash with jazzmavrik or jesc then put as wiki say
Ins_Hntch_modde=3
Ins_hntch_ref=1
Don’t understand this part? Is blheli code buggy? Which firmware is not buggy in Your opinion? Till now I didn’t see any problems with engines and ESC while using Betaflight.
Plus I don’t have telemetry as my ESC doesn’t seem to have telemetry output on PCB.
BLHeli is fine and the motors you are using are most likely fine also for a 5" quad. As you say it flies on Betaflight. I have 1404 3800kV on one 5" and 2205-2350kV on another. The former can run on 2S or 3S the later is 4S. There is quite a bit of flexibility with Motors, batter power and prop size.
And, there is nothing wrong with running Auto Tune once the initial tuning parameters are set and the Dynamic Notch Filter is configured.
Dynamic notch filter - which parameters do You refer? I have done tuning guide and there was setting INS_GYRO_FILTER = 75 Hz and few other equal half of this value. Are those notch filters?
No. In the Tuning Wiki, which you should cover completely is this section:
For the notch reference motor RPM is the best choice. If you can’t get that from ESC telemetry you can try the Copter bdshot firmware target for that flight controller. It’s in Beta.
More info here in this thread:
 i was tuned not very much like I don’t have ESC telemetry to filtering some notch filter , but anyway it’s work
i was tuned not very much like I don’t have ESC telemetry to filtering some notch filter , but anyway it’s work