My crawler has two ESCs and front/rear axle steering, which without the pixhawk, may be controlled independently thru the radio.
Set RCn_Function to 26, limits the steering control to one channel.
Set RCn_Function to 70, limits the speed control to one channel.
Yes, splitters may be used, like 2 channel setup shown below, which works but I want to rock crawl as well: i.e. independent steering and throttles.
Is it possible to use auxiliary channels to perform these mixes? I use a Taranis x9d+ with the 6-position switch update, so I can assign a function to any channel.
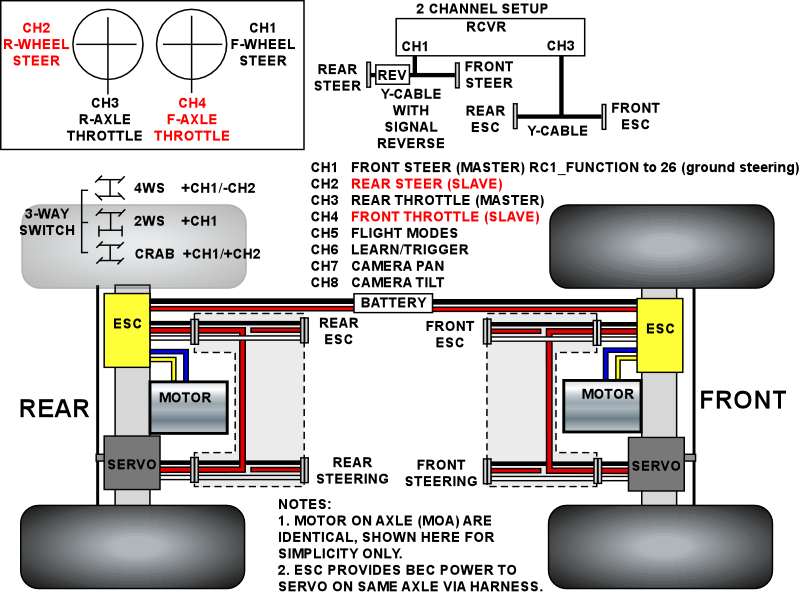
CH1 FRONT STEER (MASTER) RC1_FUNCTION to 26 (ground steering)
CH2 REAR STEER (SLAVE) SERVO2_FUNCTION to 1(RCPassThru)
CH3 REAR THROTTLE (MASTER) RC3_FUNCTION to 70 (throttle)
CH4 FRONT THROTTLE (SLAVE) SERVO2_FUNCTION to 1(RCPassThru)
CH5 FLIGHT MODES (S3)
CH6 LEARN/TRIGGER (SF 2 pos)
CH7 CAMERA PAN (S1)
CH8 CAMERA TILT (S2)
Assuming setting SERVOX_FUNCTION to 1(RCPassThru) allows the channel 2 and 4 to simply pass through the Pixhawk , still enabling the output (servo or ESC), while not effecting the Pixhawk programming.
Radio mix of Ch1 and Ch2 can still provide power to both esc’s while allowing differential thrust on the RCPassThru channel
And radio mix of Ch3 and Ch4 will also provide all three forms of steering; 4WS, 2WS, or Crab steering.
Is this correct?
Does the safety switch need to be enabled before RCPassThru command works?
Can anyone expand on RCPassThru?