Thinking about this more, I suspect the problem is going to be the same as what we saw with this T265 issue in which the companion computer (attached to the T265) was sending the mavlink messages with the exact same system id (e.g. 1) and component id (e.g. 1) as the autopilot.
If this is the issue then we ideally want the manufacturer to update the software to use a different component id (the list is here). One idea might be to use component id 158 (MAV_COMP_ID_PERIPHERAL) but almost any number from the list will be fine.
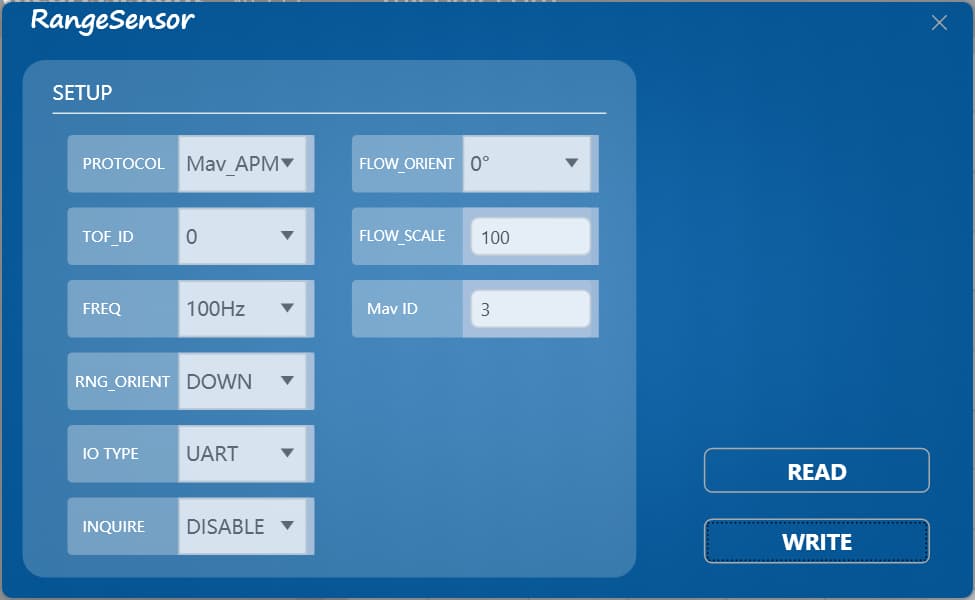
In the short-term I wonder if you could try changing the autopilot’s mavlink system id to “2” by setting SYSID_THISMAV = 2 and then reboot the autopilot and see if that helps?
By the way, it might be interesting to pull up MP or QGC’s mavlink inspector to see if you can see the mavlink traffic from the sensor.
Fantastic! We will need to tell the manufacturer to update their instructions and/or the firmware defaults they ship with.
It’s in interesting flow sensor in that I think the field of view is only 6deg. A narrow field of view theoretically means it can work at high altitudes. The rangefinder is only 8m but I have been thinking of ways to allow optical flow to work at much higher altitudes. The limit so far seems to be about 40m for most types.