a) MP warning gyro not health at the end of mission
b) It can’t be armed again when landed.
c) cold boot tried it seems didn’t work.
d) warm boot again it seems ok.
As there are quite a few points make me believe that it’s NOT a hwdef issue.
a) I have did a check of this variant board hwdef, SPI, orientation. And it can be recognized by ardupilot, working fine with acro.
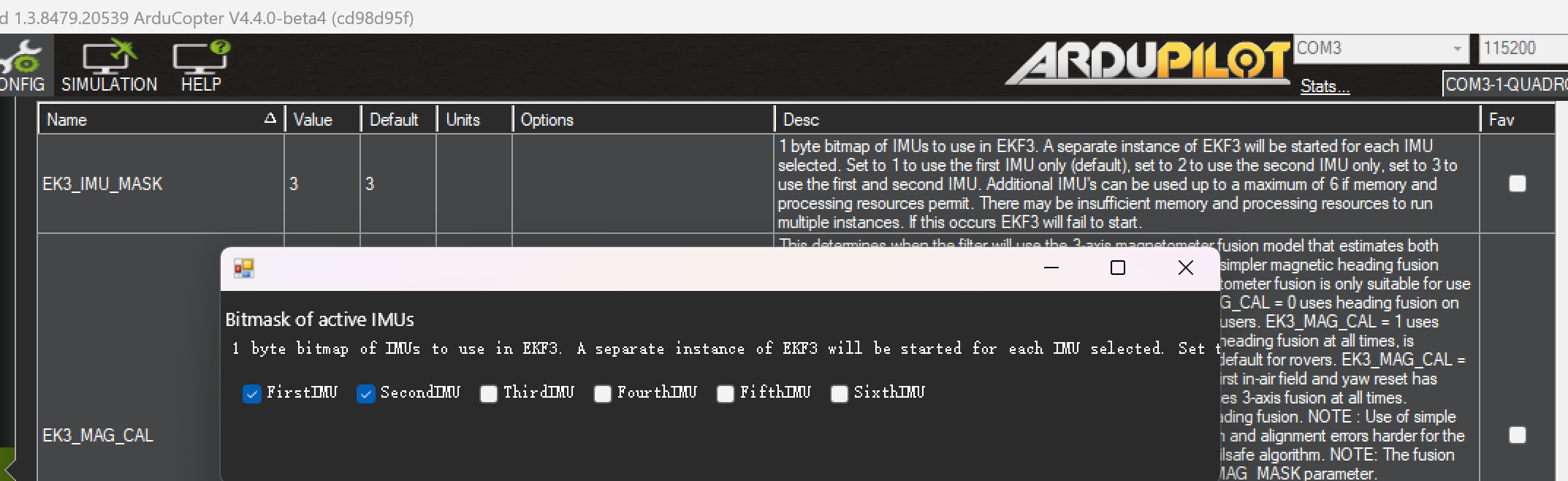
b) I have configured to use both gyro. So if the there is something wrong with orientation, it should error from the begining. I think it can’t be armed.
— From this video, —
c) 80% of the mission, gyro works fine. And it reported warning message at the end of mission.
d) when landed, it can’t be re-armed, even cold boot.
e) with multi-reboots (cold boot, warm reboot), it works.
f) fly in acro mode without a problem.