@oveh , were you able to use Arupilot FW on 3dr Pixhawk Mini? I also have the old board running Px4 stack, but I would love to use more familiar to me Arduplane.
3dr pixhawk mini its FMUv2… just check if it have the MCU stm32f427vit6 rev 3 coz i notice that some clones like the pixfalcon have a different mcu that are limited to flash size.
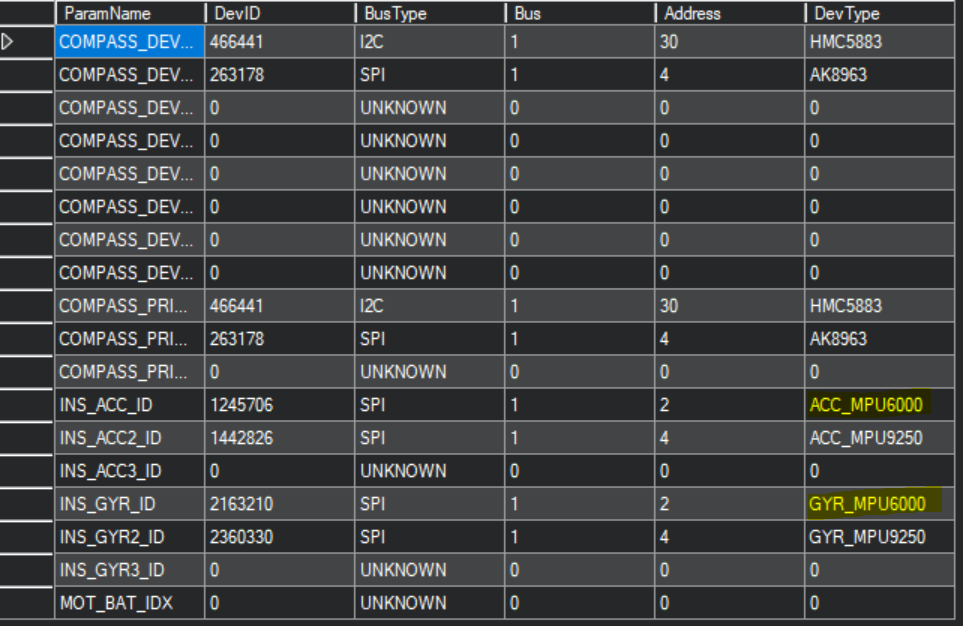
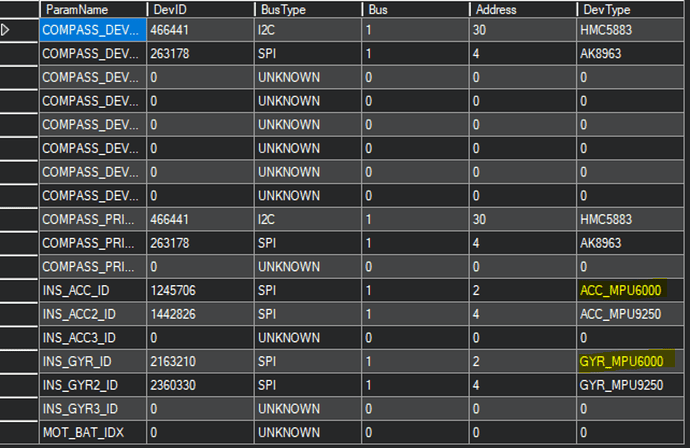
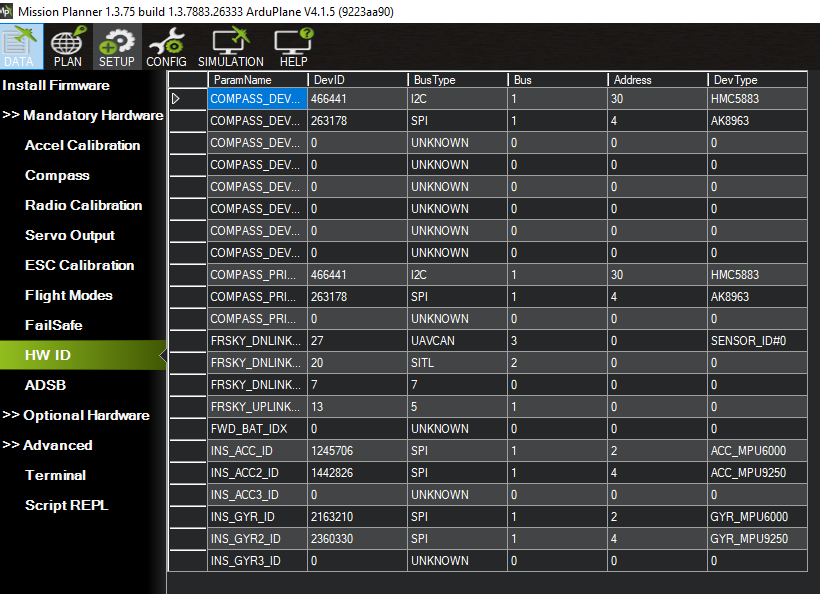
When i tried the Pixhawk firmware back in 2020, only the MPU9250 was detected HWID page, the ICM20608 (identified as a MPU6000) was missing, but that might have changed now…
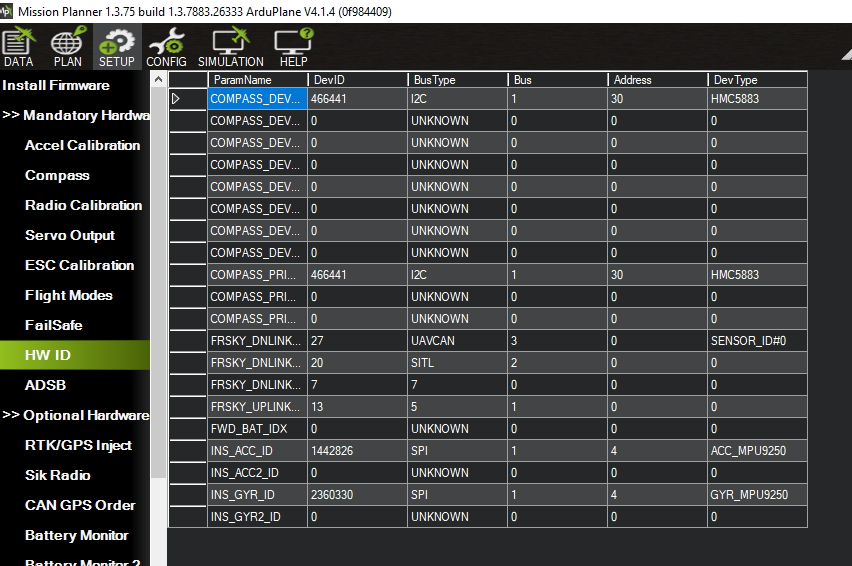
I was able to flash both Pixhawk1 and FMUv3 to the 3DR Pixhawk Mini board, but as far as i remember, one IMU was missing on the mission planner hardware page when i was using the Pixhawk1 firmware, that`s why i ended up using the FMUv3 firmware.
It looks like the ICM20608 is missing with you also… Try the FMUv3 and compare.
If Pixhawk1 doesn’t show it correctly I don’t see how FMUv3 can as the 1st includes the 2nd. From the Hwdef file for Pixhawk1: '1. hw definition file for processing by chibios_hwdef.py '2. for pixhawk1, based on fmuv3 '3. '4. include …/fmuv3/hwdef.dat
I found the original booklet that came with Pixhawk min. This is what’s listed
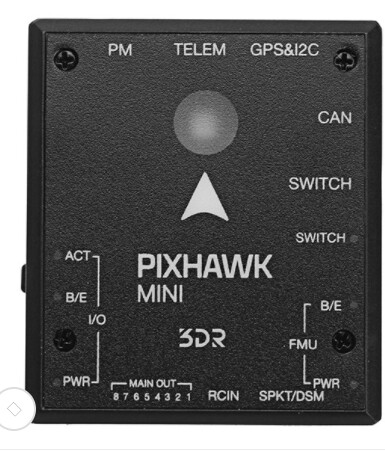
Interfaces:
1 × UART Serial Port, Spektrum DSM/DSM2/DSM-X®, Satellite
Compatible Futaba S BUS® Compatible Input/Output,PPM Sum
Signal Input, 12C, CAN, ADC, Internal Micro USB Port
Yes all FC have built in barometer, and it seems to be reading it. Although weather station is reporting 754 mmHg and at home its 986 mmHg. I guess its inside vs outside variance.