Hi,
I am setting up a Pixhawk 2.1 hexacopter, and am trying to calibrate the three compasses.
After having figured out a workaround to at least initiate the calibration, I’m now struggling with “Bad Compass Health”.
http://ardupilot.org/copter/docs/common-compass-setup-advanced.html#overview lists as compass #1 the external one, and as compass #2 an internal one.
I have externally mounted a Here compass and a Here+ module - which to my understanding also has a compass integrated, correct?
When they are all connected, I am unable to initiate the calibration procedure (using MP 1.3.58.1, and Copter V3.5.7).
To even start the calibration, I had to first disconnect both external ones, then calibrate only the internal one and reboot.
Afterwards I could connect either one of the two external ones, but had to do it one after the other (with leaving the one not getting calibrated disconnected).
Is this normal? I thought I should have been able to calibrated them all at once.
I assume the compasses are enumerated as follows - correct?
- No. 1 = Here
- No. 2 = PH 2.1 internal
- No. 3 = Here+ (RTK module)
What really keeps me from moving on now, is that after doing this, I am still unable to arm, and am getting “Bad Compass Health” messages on the yaapu telemetry, in combination with “Error pos / ver variance” (while on the bench).
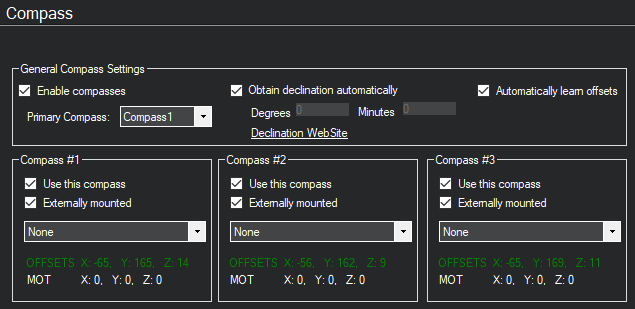
(In MP > initial Setup > Mandatory Hardware > Compass) Compass #2 offsets shows up as yellow with X: -124, Y: 545, Z: 47 (the others are green).
Do the above error message result from the high Y - offset value?
And which compass really is #2? If it is really the internal one, how can this error be corrected? (It is “standard-mounted” on top of the center plate, and centered, and close to the CG.)
What must I do to get flying? Any help is much appreciated! Thanks!

 .
.

 :
: