Incident: drone took up manually, went to the first waypoint in auto mode, then suddenly flipped (30m alt) and crashed on the ground while aggressively rotating upside down. Still not sure why it happened !!
Attaching the .bin file. Some observations(graphs attached):
Event file is very interesting and equally weird: acc to it the drone had landed when it was at 30m, so it was disarmed and was armed again after 24 sec. Is it even possible to rearm after disarming? How can it detect landed at 30m alt?
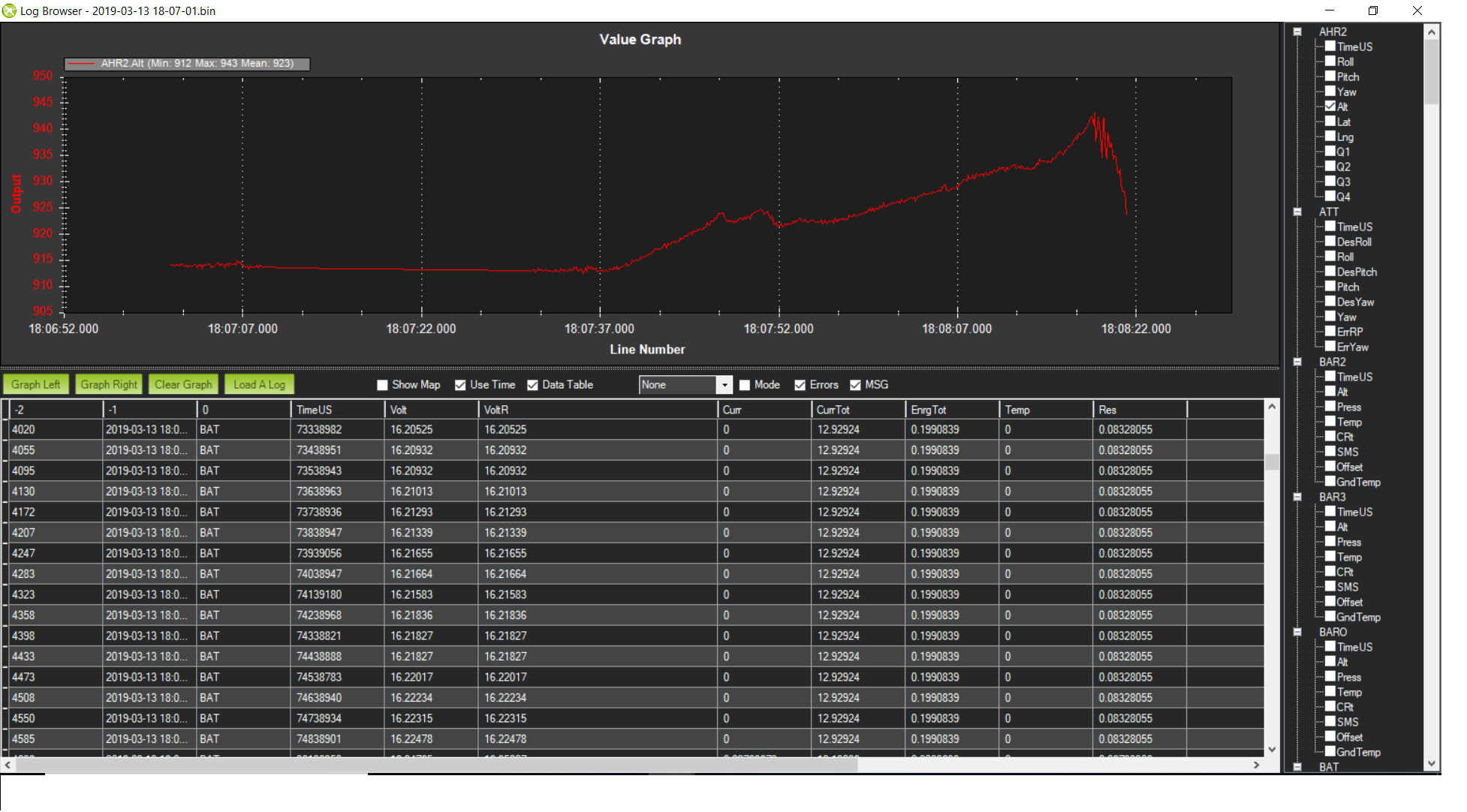
The battery current drops to 0 in areas where event file shows disarmed.
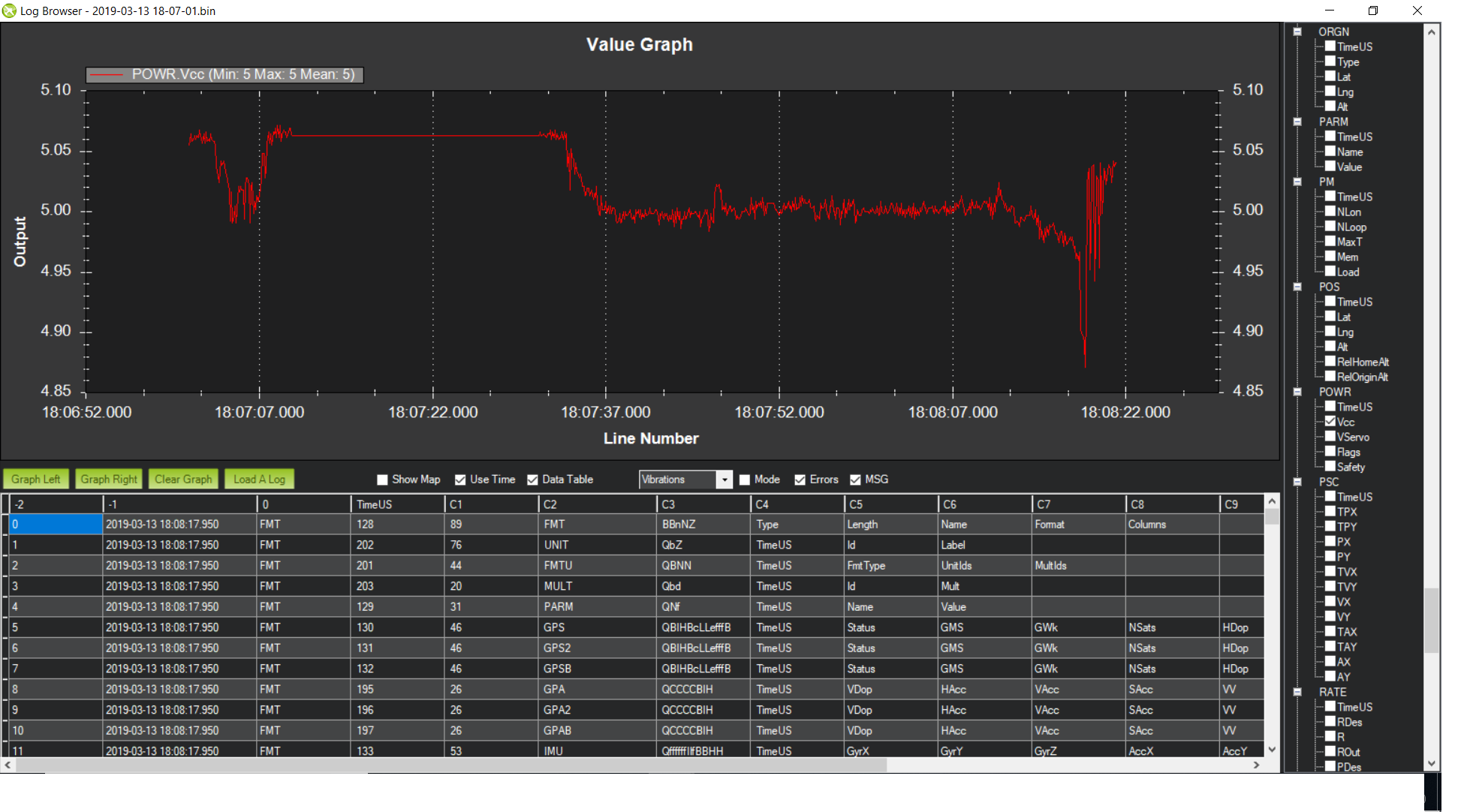
Vcc of pixhawk shows heavy voltage fluctuations when the drone was flipping down
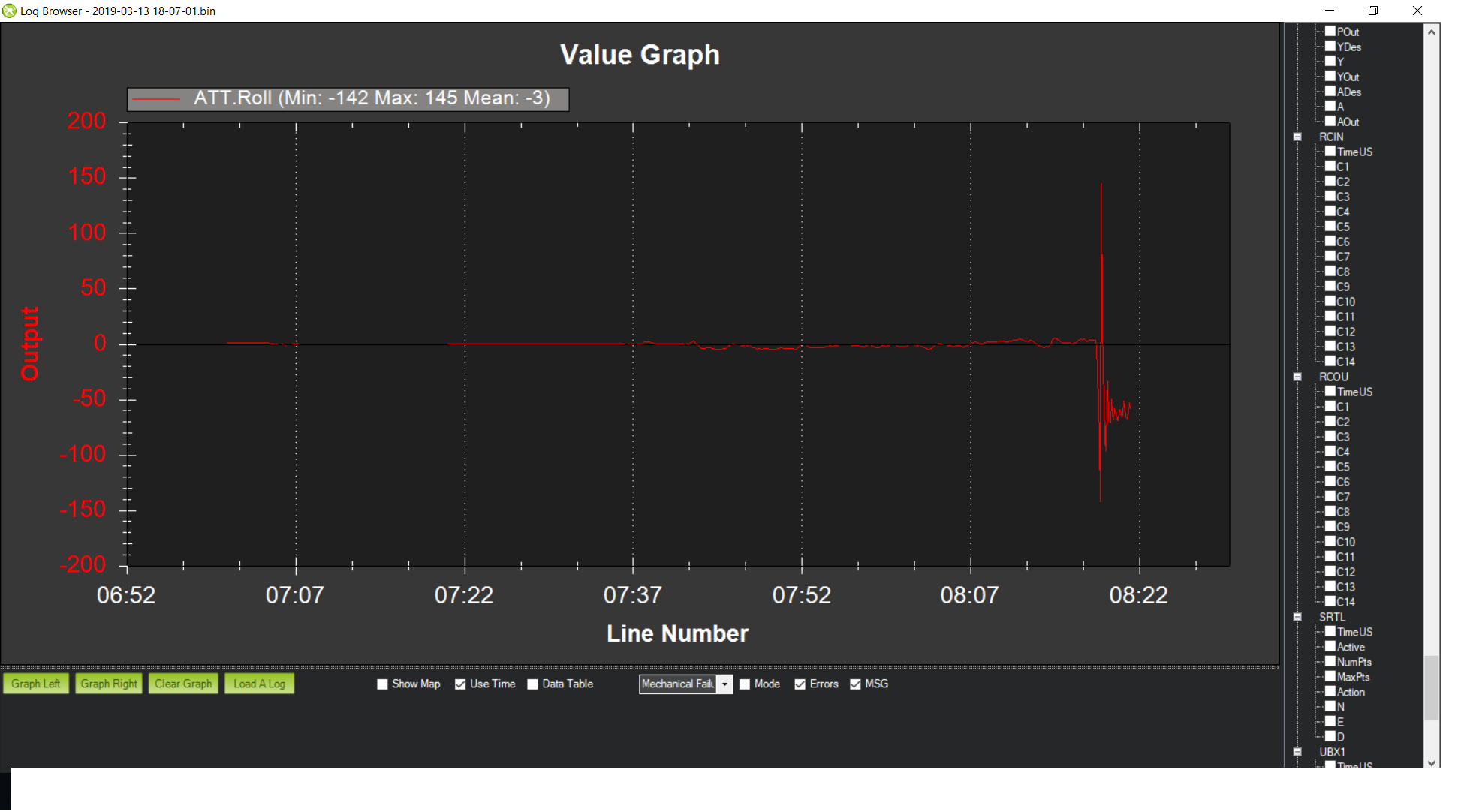
Significant diff in RCin and RC out of channels 1,2,3 and 4.
Mechanical failure also seems to be detected.
Ctun alt shows that the battery got disconnected in flight!
With all these, I am still not able to find the reason for drone flipping…
Any help will be much appreciated.
There are two takeoffs in the log. A short first one, armed by stick, lifted to around 2m height then landed and disarmed by stick as well. The second one which ended in a crash. It seems a short in motor2 (or in ESC). Motor output maxed out (means it does not provide enough lift) and at the same moment current jumps from 20A to 40A, which overloaded the battery as well. Then drone tumbled down uncontrollably.
@Eosbandi thanks. But which parameter gives info that motor output was maxed out?
Also, we tested after the crash and the motors were functioning properly, could it be a one-time phenomenon? How to prevent it from happening again?
Test: Parameters = FAIL - ‘THR_MIN’ not found-- had this command in the output of Auto analysis, what does it mean, can’t find this parameter in the config list or param tree!