Does somebody have a good setting for a powerfuil 220 Racecopter with 5 inch props and maybe higher PWM rate. I can use Dshot600 or Multishot or Oneshot125.
At the moment my copter is flying away with the minimum PIDs with 400Hz PWM rate.
I think a higher PWM rate would be better. Does anyone have experience with this and some settings, I could start with?
I use the Omnibus F4V3 board with MPU6000.
Hi, with 5" props on 350 size quad I had to start with default PIDs and then half those, and then reduce them even further before I got a good starting point (possibly to a quarter of default PIDs). You may well hit the minimum thresholds in the GCS and have to override the values - that’s fine. You may also want to increase the filters from 20hz to 40hz.
PWM rate is unlikely to be causing any problems, would recommend dshot as you’re using chibios firmware.
Fly away, depending on what you mean, is possibly more to do with vibrations. Look at the logs and if you’re clipping in any axis then change the FC mounting.
Did anyone already try higher PWM frequencies successfully?
I could share PID’s for a 210 size quad with a PixRacer. I’m using Oneshot 125 only becuase the ESC’s don’t support Dshot or I would be using that. 3.6 RC3 Chibios.
yes, please share your settings. There should be no big difference of the PixRacer board.
OK, here you go. It’s now flying well with these parameters on 3.6Rc3 Chibios.
QAV210 3.6rc3 chibios.param (14.2 KB)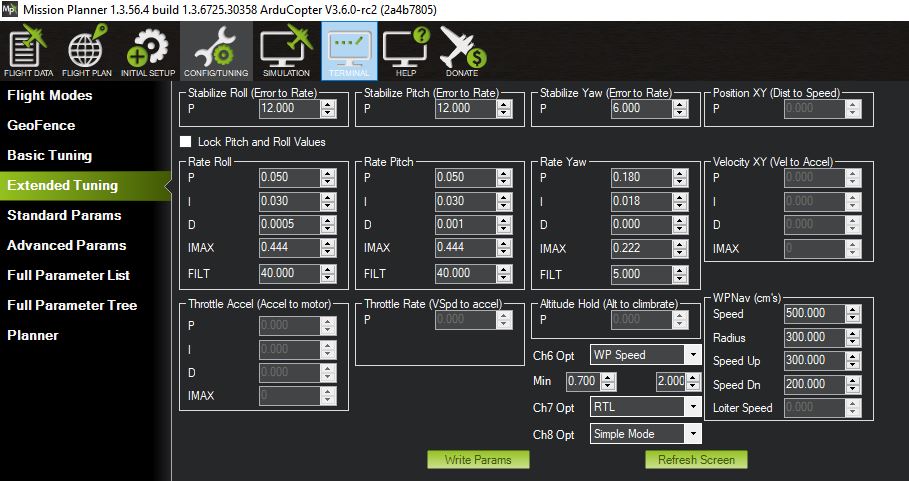
Thanks I will test it.
Copter flies good now with RC2. Thanks a lot. Had to reduce the P-values for the altitude hold ,too.
1 Like