Hello,
I’m not sure if this is related to 3.6.0* update, but I haven’t seen this before.
I had an issue where the drone was not able to disarm after landing, but kept looping following states until remote disarm or taking off back to air.
2018-06-08 16:02:16.132 DATA_LAND_COMPLETE_MAYBE
2018-06-08 16:02:17.015 DATA_LAND_COMPLETE
2018-06-08 16:02:17.026 DATA_NOT_LANDED
2018-06-08 16:02:17.331 DATA_LAND_COMPLETE_MAYBE
… and so on…
Only way to disarm the drone was to use MissionPlanner Actions to call remote disarm.
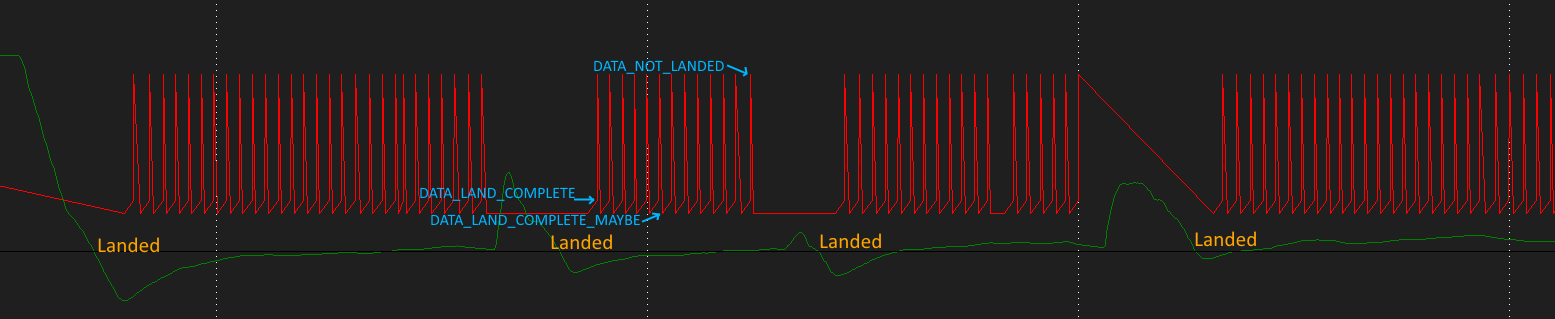
On the chart the red is
EV.id and green line is CTUN.Alt.
What could cause this kind of behavior? What to do to avoid that?
Could some one tell me more about this parameter PILOT_THR_BHV and could it help in this kind of situations. PILOT_THR_BHV was 0 at that time.
Please see LOG.