I have been looking into building a 250g quad for flying after seeing my friends mavic mini fly for 30 minutes I wondered how much longer I could make one fly.
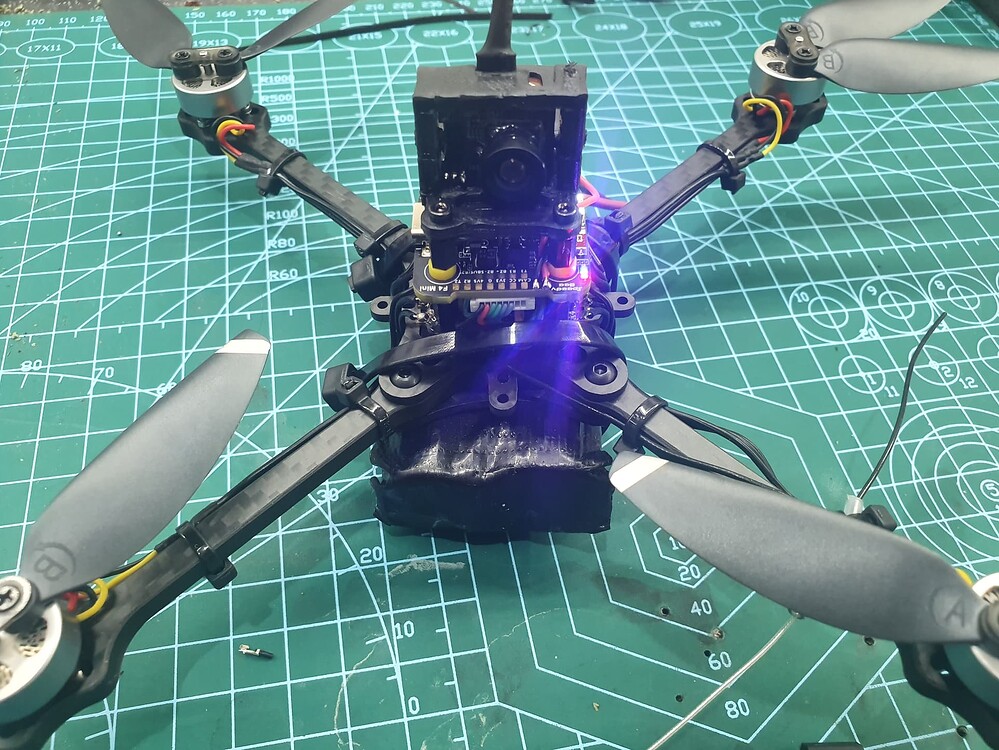
My first attempt at 250g got me 52 minutes while hovering indoors but to keep it under 250g with the 2s 5000mah battery I had to take off the GPS, so it was all manually flown for that 52 minutes. The quad is just built with some cheap aliexpress parts, The frame is a light weight racing quad drilled to take the 3 bolt motors, Motors are 1405 2850kv with 4.7 inch propellers off a dji mini clone, ESC is a 20A 4 in 1 hakrc, Battery is a 2s 21700 5000mah pack, fc is a speedybee f405 mini controller with r9mm receiver running mLRS for mavlink telemetry and 16ch RC.
in order to test it outside I had to print a camera and gps mount rather than just having the camera held to the stack with a cable tie, This first print was a bit heavy at almost 3 grams along with the GPS brings the weight up to 260G
With that extra weight, the 20mph wind gusts and flying in circles got me 44 minutes flight time. It could have gone for a few more minutes but the ESC I am using starts to cut out when it hits 6v with ardupilot flashing “thrust loss” errors.
so for version 2 I have ordered
6mm carbon tube to make a frame, I can save about 10-15g
dji mini 3 propellers and motors, more efficient motors and larger 6x3 propellers.
4x 6a 2S escs, 2g lighter and wont cut out under 6v.
lightweight GPS that will save 3g
lighter printed gps mount to save 2g
Lighter AIO camera/vtx that will save 2g
titanium motor bolts will save 2g.
5000mah mobile phone batteries that should be around 10g lighter than 2x 21700 cells.
with that I think an hour might be possible while being under 250g.
Pretty impressive!!
Theory tells us that larger props (on larger drones) are more efficient and grant longer flight times than small props. But it’s really nice to see a tiny quad beating regular (unoptimized) quads in flight time.
The fact that it is hard to optimize flight time for larger quads is probably partially due to the square cube law.
I dont think any digital systems out there are light enought, the camera/ transmitter im using is only 4g and im replacing that with a lighter tx06 2.6g camera/transmitter.
walksnail also has some impressive lightweight stuff designed for 1-3S builds. I have thought about getting a set but already have way to much dji stuff hahaha
I never knew they made them so light. I still have a connex prosight lol.
I have got my frame idea from here, its basically going to be a tube X frame notched in the centre so they can interlock with some plates to stiffen it. I think I can get it under 15g, mounting the motors is going to be the hard part.
Im going for a similar design to this but much thinner as im not flying 3d.
Have you thought of going for more blades, keeping the same pitch? Then the motor most likely spins slower for the same thrust, keeping the ampere down.
You may want to install a lightweight downward-facing optical flow sensor, e.g. Hereflow, Ark Flow, then GPS is not needed for position holding. But optical flow inflight calibration will be a challenge.
In firmware 4.0.x, I experienced drone continue climbing when optical flow enable WITHOUT rangefinder in 1, I accidentally place another external rangefinder height sensor in 2. I didn’t configure the HEREFLOW onboard rangefinder to 1.
I am not sure does this still happen in latest firmware.
Your flight times both indoors and out are very impressive given the size of the quad. I’m looking forward to your iteration on this project!
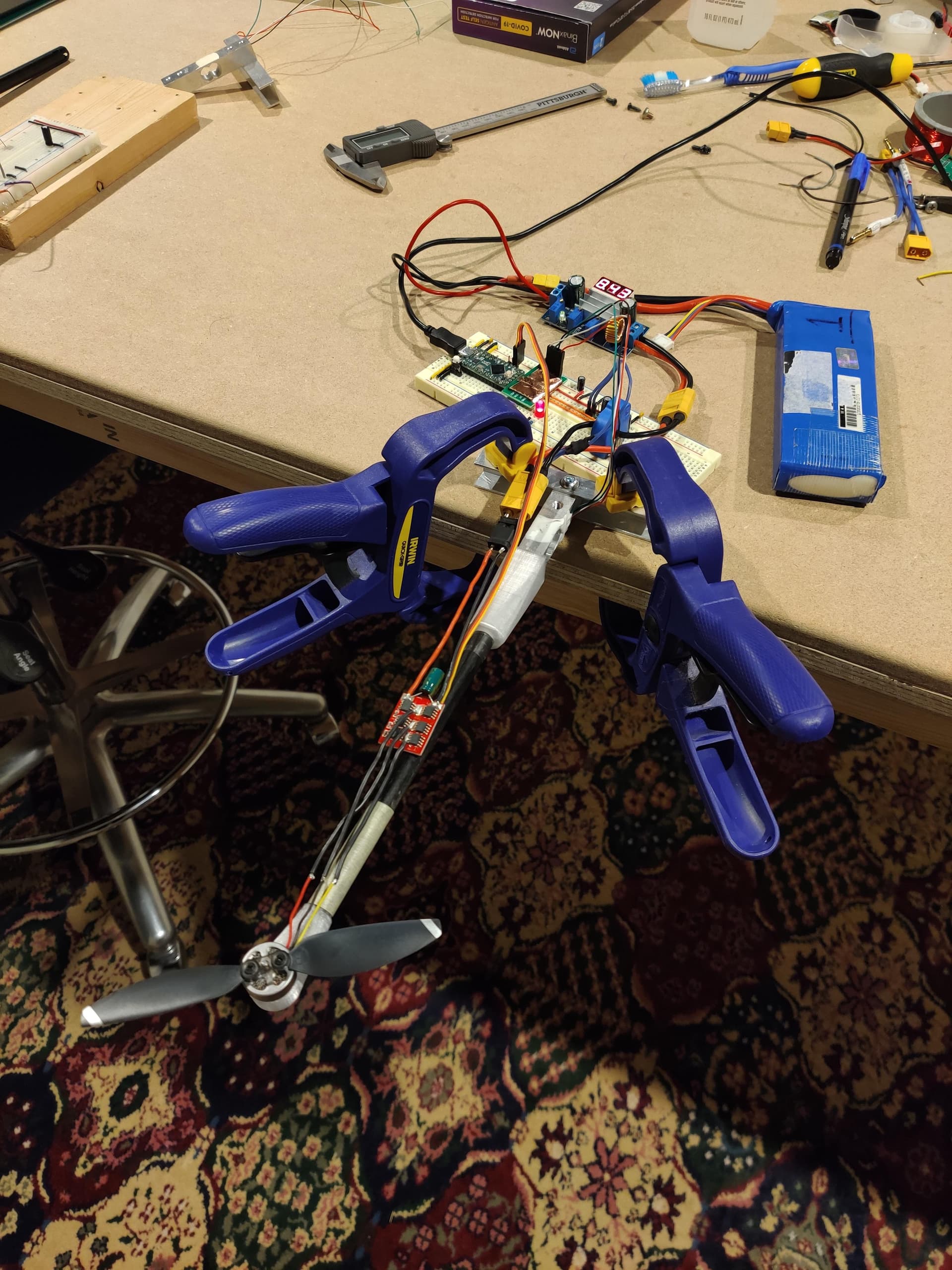
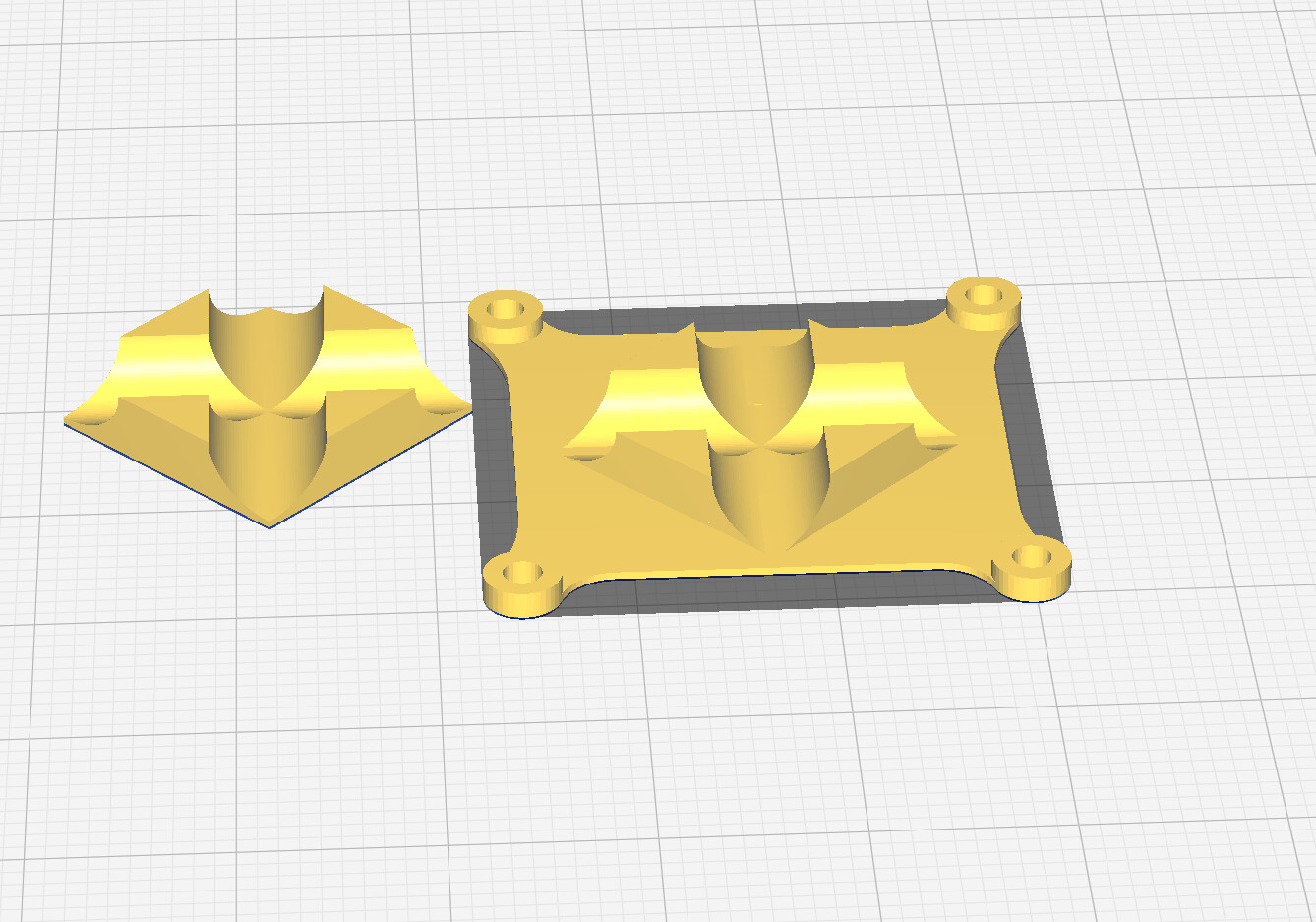
Coincidentally I’d recently bought the same motors off of Aliexpress to attempt the same exercise I haven’t gotten far with it but plan on using 6mm CF arms and 3D printed mounts for the motors:
The mount needs some tweaks but I’d be happy to post the STL once I clean it up. I got some of these screws to use 3mm M2 Screws but I discovered I don’t actually have an Allen wrench that small
While looking for small compatible boards I have seen there was this AIO board, I didn’t think there was another micro AIO board supported by Ardupilot and that this one had changed the gyro, but the supported version is still available in places, unfortunately it’s expensive but it’s the only one I could find with an analogue OSD.
I keep looking at that HD zero camera, if I can hit over an hour with the analogue camera then il get it to try and make a digital version
I made a 3d centre to glue in rather than carbon plate, I can get it down to just over 1g with the fc mount integrated.
What does 21700 means, model, some capability?
What battery type is it?
Does it has the surge or peak capability as well?
Does this type of battery and series it work also, we were discussing it previously. This type too.
“21700” is a specific battery formfactor, similar to “AA”, “Baby”, “Mono”, etc.
21700 is a round lithium cell with 21mm diameter and 70mm length.
Basically the bigger brother of the 18650 lithium cell.
1.5V cells maybe work, I’m not sure if they can provide the needed current and you need more of them in series for the same voltage.
The exact cell you linked however is likely a scam, there’s no way in heaven or hell that they crammed 12.8Ah in there. And even if that technology existed today it would cost more than 4$/cell.
I bought it for my home digital lock, I date stamp it to see how long it lasts. we will find it out. unless we have an E-Load (electronic load) machine/equipment to verify it.
those batteries are generally around 800mah, they are for xbox controllers and other low power devices not powering a drone. You would need 22 of them to equal the capacity of a single 6000mah 21700 cell.~