I will do some flights today(public holiday) with some wind hopefully.
My quad is currently on Ver 3.5. If I want to upgrade to a newer version what steps must I
do before and after upgrade? Do I just upgrade and are good to go?
I have looked on the Web but can find any answers. If there is any documentation, could
you please point me in that direction.
Did some flight tests in mild windy conditions and found it still warble a bit.
Tried a flight with these settings:
INS_GYRO_FILTER,80
ATC_RAT_PIT_FILT,40
ATC_RAT_RLL_FILT,40
No autotune, to windy. Seemed a bit worse with those sttings.
I returned filter settings to 40, 20 and 20 respectively. I then set MOT_PWM_TYPE to 2 (OneShot125), calibrated the ESC’s, and it seems more stable.
Should I autotune again after changing to “OneShot125”?
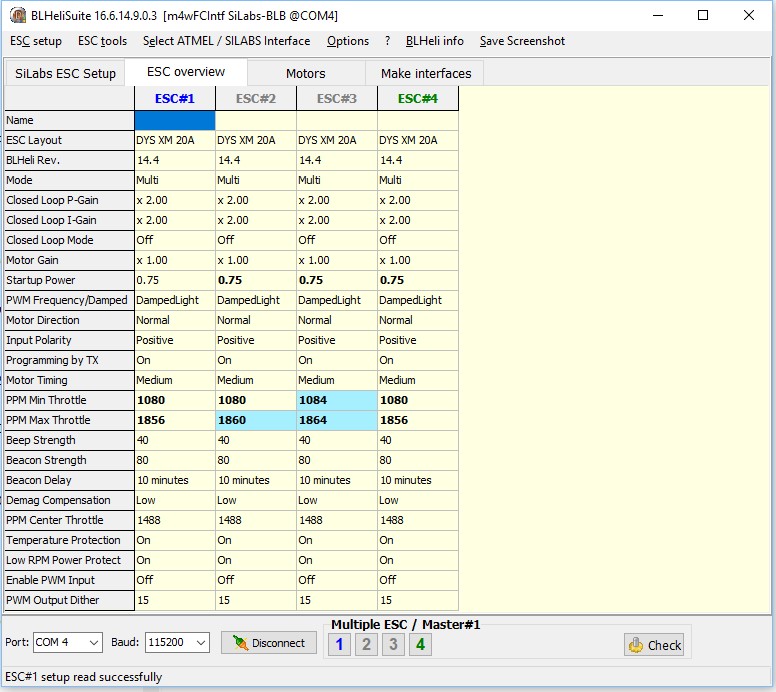
Is there a way to program ESC’s using BLheli suite and the flight controller (pass trough)?
Sorry for all the questions, just can’t find answers on the internet.
The question is more in general. I own two other aircraft (F450 and F550) that is still on older firmware, can’t remember what exactly. What would the procedure be if I want to upgrade them?
Depending on how old, you might have to set a parameter or two…
Most likely, if upgrading from a version before 3.5 (or maybe 3.4) you’ll need to set a frame type and maybe board type parameter in the config. It will tell you in your pre-arm warnings (on the HUD in Mission Planner) if they are not set.
Otherwise it should automatically update any other values that changed. (as far as I know… that’s how it worked for me)
Could you please elaborate on this use of the Aux ports with Oneshot125 enabled ESC’s? It doesn’t apply to my Pixracer mini quad but I have other craft with Pixhawks and Oneshot125 enabled ESC’s and I have always used the main ports.
Henry-I use a cheap Naze32 FC to configure BLHeli ESC’s.
I had a little time to try some tuning today…
Auto-tune always puts me at around .03-.04 for roll and .06-.08 for pitch.
It hovers great, but was wobbly when flying and in the wind. Rocked a little when stopping after a fast flight.
I tried lower PID’s… .02 and .03, and it was about the same… Good hover and slow flight, but wobbles on anything aggressive.
So, I tried .09 and .12… It seems great with these! No oscillations. And, it’s more responsive and seems to hold its position better.
I only had about 20 minutes to mess w/ it today and it’s not windy, so I’ll have to fly more before I know if these settings are good.
Hi mate,
Could you send me an autotune log? If you have some rate noise issues you can often get a very low autotune unless you really bump up the autotune aggr.
I would be interested to see how you go with a good autotune with the AUTOTUNE_AGGR set to 0.2 (I assume you have it set to 0.1).
So everybody understands. The AUTOTUNE_AGGR value defines how far over the desired set point the aircraft moves. So when you ask for 90 degrees per second it increases the rate P term until it overshoots to 99 degrees per second. If you have rate vibrations that are 10 degrees per second (pretty easy with higher frequencies of mini quads) the aircraft is only doing 89 degrees per second but the added vibration takes it to the limit of 99 degrees per second and you get a lower value than you should. This is similar but a little more complex for the D term.
It might be a couple days, but yes, I will auto-tune and post a log.
I have not done an auto-tune w/ 3.5. My last was 3.4.
I might have even had the aggr set to .05 for one of the axis.
Yeh, you are limited to the main output ports then. I am not familiar with the Pixfalcon so I can’t comment on exactly how they are set up.
You should be able to simply upgrade and select your frame type. Your tuning parameters should carry over. I generally do a fresh install then go through all the calibrations then do a “compare” with my old parameters and bring in my tuning parameters.
So the Aux ports are directly connected to the main processor so they don’t have the additional latency of the IO chip. So for the best performance you should go with the Aux connectors. When I put forward the requirements of the Pixracer I specified the use of the Aux ports only so you don’t have to worry, just go to oneshot.
I hope that we will be able to increase our loop rate to 1kHz before long and lock the loops to the IMU read. This will further reduce the latency but more importantly improve our ability to filter. Finding the time is the challenge…
Thanks Leonard-To be clear you are saying for Pixhawk with Oneshot125 ESC’s to use the Aux outputs for motors and configure the SERVOxx_FUNCTION to motors 1-4 (which is default anyway)? Any other parameters to change because when I try this I get no action from the motors.
I have not used the pixFalcon but I have helped a few people out with it and found an issue with a couple of boards with IMU 1. There is a good description and demonstration here:
The Pixfalcon has a on-board buzzer. When I converted my ZMR250 to use the Pixfalcon, I decided to remove the buzzer and extend the contact points with wires to use external buzzer. My first flights was OK and then I autotuned. The quad fell out of the air right at the end of tuning the Pitch axis(dodgy battery). In trying to determine the problem I soldered the buzzer back on the board. After that, every time I switched to Alt Hold, the copter would just shoot up straight into the air. No matter what I tried this would happen every time I switch to Alt Hold. Eventually after much head scratching I removed the buzzer from the board again, this time without any buzzer connected, and suddenly Alt Hold, Position Hold and Loiter was perfect. I since connected a eternal buzzer far away from the controller without any ill effects.
It seem that when the flight mode is changed and the buzzer beep to confirm mode change it causes some interference that upset something(IMU?).
My F450 also use a Pixfalcon and I had no issues like that. I can also mention that it had a different size buzzer on-board than the one on the ZMR250. I also removed the buzzer from this one and replaced it with a external buzzer.