Thanks wicked1 and henwilsch to confirm how hard we are trying to build small capable arducopter quads and or we are all making wrong or AC 3.5 have problem with small copter, let’s say sub 250mm. I hope all these troubles could help experts, devs and @Leonardthall to see and solve this.
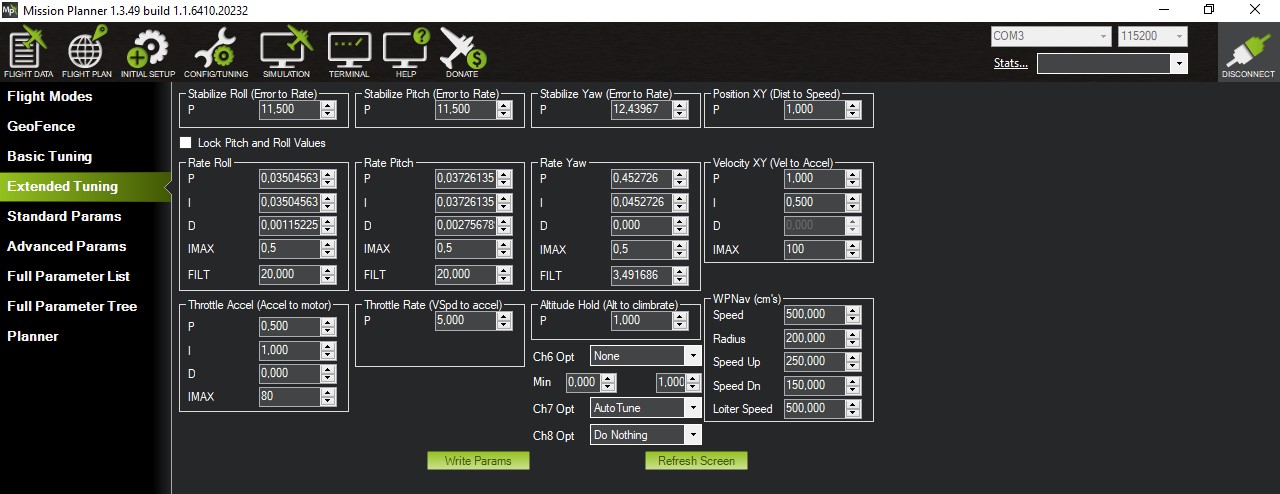
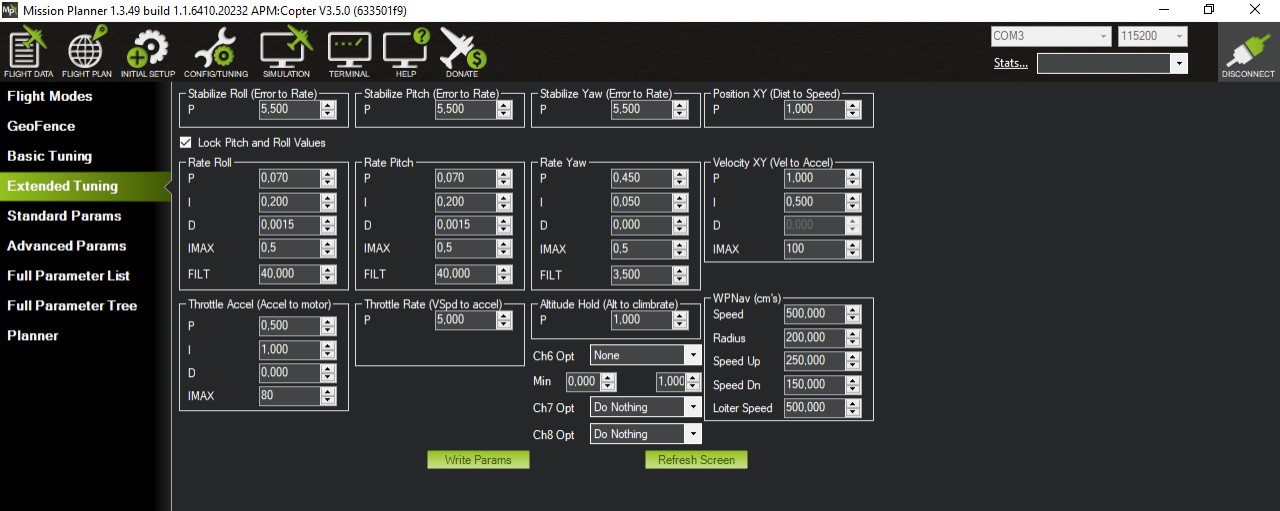
I’ve spend so many days to autotune in no wind condition, and the best PID I come up are these:
Stabilize Roll P 11.64006
Rate_Roll_P 0.06581955
Rate_Roll_I 0.06581955
Rate_Roll_D 0.002
ATC_ACCEL_R_MAX 247259
Stabilize Pitch P 18
Rate Pitch_P 0.06168013
Rate Pitch_I 0.06168013
Rate_Pitch_D 0.002548281
ATC_ACCEL_P_MAX 211818
I see stabilize P Roll and Pitch are so out of range! why?
ATC_ACCEL I have no idea about it, I could only accept this value and nothing more, but I see it makes a lot of difference.
And with this PID I have so bad performance in Alt Hold
see here also https://discuss.ardupilot.org/t/altitude-drifting-in-pos-hold-and-alt-hold/19540/10
I tried Autotune and it is OK with no wind, but the slightest wind makes it warble
around(fighting to stay level). I have tried different PID settings, but nothing seem tomake it better.
I can confirm here I have the same, with no wind its good, but with a small wind its really bad to see it always fighting and with no autostabilization power.
I have found this on the internet “one thing i noticed after building a new 250 with
pixhawk is that I needed to change my INS filters from 20hz to 40 hz. made a huge difference.” Can anybody comment on this please.
All the last tons of autotune I’ve made, and also the above PID are made with INS filters set to 40 hz, please try yourself and report how yours PID will change.
If we all are going to gave up with AC 3.5 and small copter, this platform is not going to solve this .
Please let’s work on small copter, we see a lot of potential, I could provide some platform to @Leonardthall or other expert for test and continue the testing and provide more datas.