Hello, i am currently seeing older videos and stories of long time flights being dropped out because some pixhawk failure. Now the questions i am enquiring is, is there a way to attatch 2 pixhawks onto 1 plane in order for redundancy. So incase the plane’s primary pixhawk goes malfunctions, is there a way for it to switch to the second pixhawk to continue its desired course of action?
Good day, i don’t think it’s possible use two flights controllers in only one drone or airplane.
You can add a redundant power source… a dual sbus receiver and gps.
Now a day hardware is more solid and also the code…, I’ve done many hours of flight time with my mro x2.1 777…control zero… and pixracer without any fly away
There is initial work on this in the arducopter firmware. But is is not ready for production use yet AFAIK.
1 Like
This is getting more into a high level type of autoflight, @amilcarlucas, what kind of work is exactly being worked on in the firmware persay?
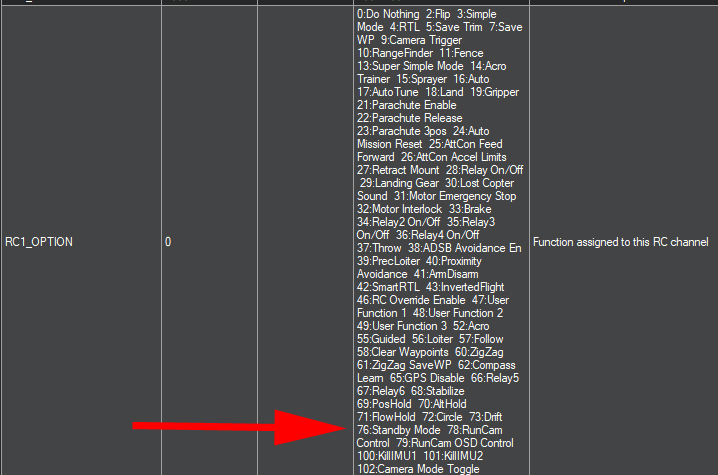
The standby mode allows multiple pixhawks to run in parallel and only one is in charge. The pods of the sleeping ones will not go crazy


Good day,
how can be connected the second fc…i would like test this system
@Dave84 Read the links posted above and expand the software and develop the hardware yourself. There is no complete turn-key solution yet.
1 Like