I did a test-flight with both battery monitors enabled.
It was an endurance flight where I flew down to 3.3 volts on the lowest cell. That resulted in 35 min of flight time.
First off, I got battery fail-safe at around 20 min. I kept flying since I was at around 21.6V. The battery monitor on the craft also reeds a bit low. I have a frsky voltage module sending telemetry to ma radio as well. I also used a Bluetooth module and mission-planner on my android phone to monitor the readings.
So I kept flying until I reached 3.3 volts on my lowest cell according to my frsky telemetry.
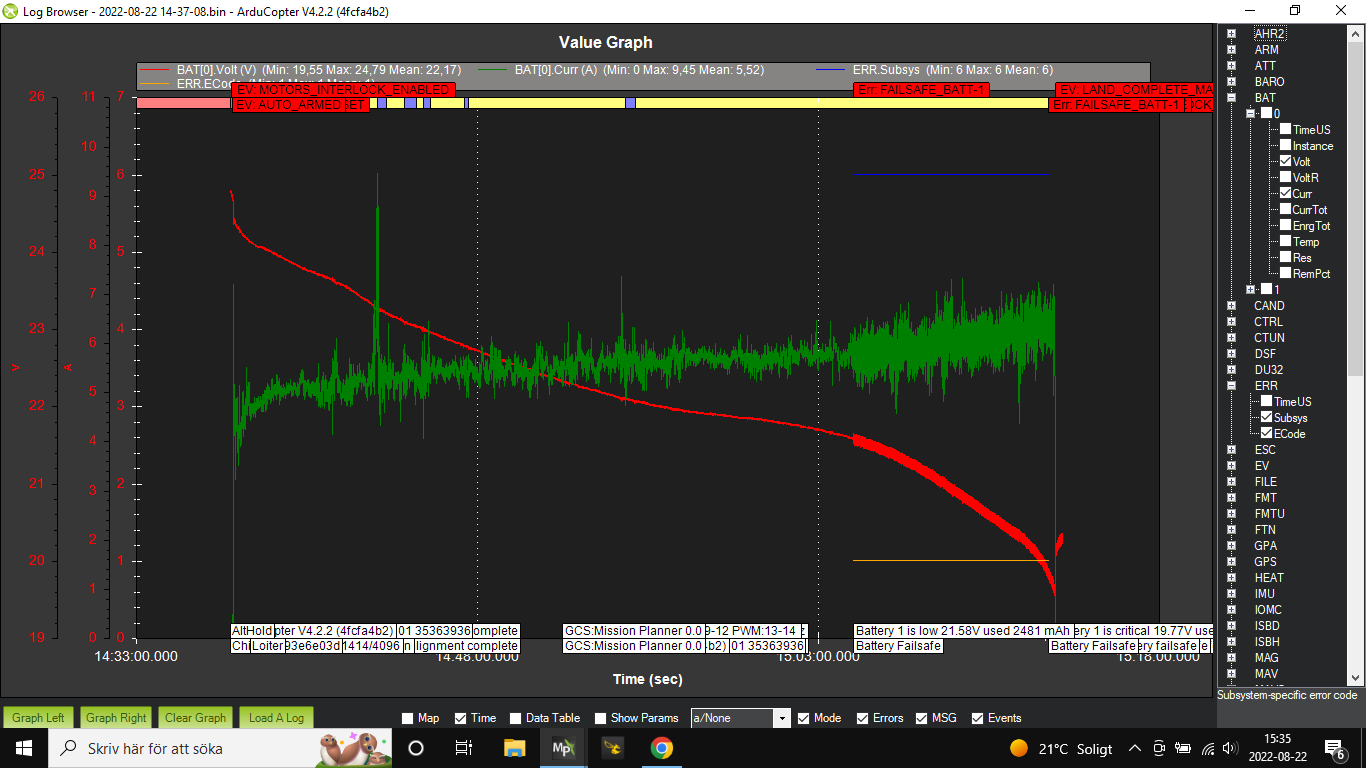
If you look at the logs, the current and voltage readings start to get noisy after the battery fail-safe.
If this is the actual current draw. That much oscillation/noise can’t be good for the flight time.
It also draws under 6 amps almost the entire flight. I’m running a 6s 6000mah so I expected a bit more than 35 min when I saw the current draw.
(I’m charging my battery now so I’ll see how many mah the charger put in to it to get if full again)
The noise level stays low though. Even if the current is noisy. I didn’t see any oscillation in the drone of hear anything during flight either.
My battery voltage between the cells had a difference f close to 0.1 volts after the flight. (the lowest at 3.3 and the highest at about 3.4) Is this normal? A bit low, as you usually wouldn’t go below 3.5 though. But the voltage difference in the cells is the same if I discharge to about 3.5 as well.
After doing this calibrate the current sensor by revising the amps/volt value based from Mah logged to mah consumed. Do this for a few flights and then it will be close enough.
I fly based on consumed mah and plan to land ~85% of pack capacity. I keep my eye on voltage but it’s not the metric I use for flight time. This works well unless it’s a very low C battery and you have to be careful of Li-Ion.
I left my charger fot a bit. When I came back it was finnished. Although the mah protection had kicked in it said. The protection limit is at 6100 mah and the battery is a 6000.
I measured the voltage and the battery was not quite topped off. I put it on tje charger again and it put like 200 more mah in it and stopped than.
How could this happend? Also, the full battery has one cell at 4.14 volts at its lowest and 4.19 at ot’s hoghest. Is this normal for a charged lipo?
The batteries I use are quite old now, maybe that’s why?
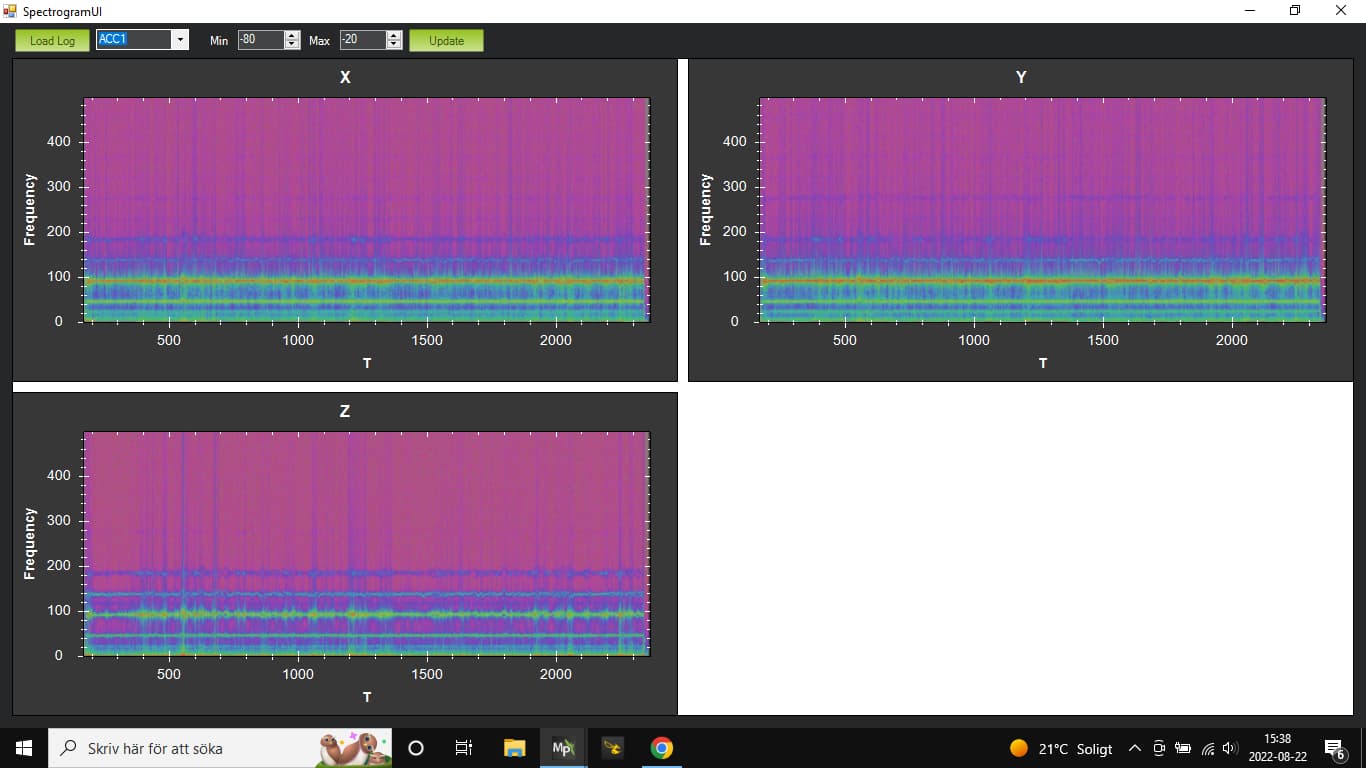
You should be able to see what values I’m looking at. This could be what caused the voltage and current noise? Or is the noise resulting in this?
I don’t know what values I’m looking at other than that they have something to do with the motors and was affected by the fail-safe, just like voltage reading and current.
I’ve seen that noise on the voltage and current values after failsafe. It happens because the flashing LED and the buzzer are now drawing current that makes noise on the internal 5vdc supply of the flight controller. It’s not real noise or measurable fluctuations on the actual battery voltage.
You can improve that by disconnecting the buzzer, 99.99999965% of the time you’ll never hear it in flight anyway
Here’s how to adjust you’re Amps Per Volt
Plug in a fresh battery and do a hover flight for 5 minutes or until you’ve used a signifcant amount of battery capacity
Immediately unplug the battery and charge it, note how many mah’s it took to charge. Let’s say that was 1,500 mah
Download your log and look at maximum CurrTot. Let’s say it was 1,300 mah
Get your existing BATT_AMP_PERVOLT setting from Mission Planner
NEW_AMPS_PER_VOLT = OLD_AMPS_PER_VOLT * CHARGED_MAH / LOGGED_MAH With my example numbers, you’d get NEW_AMPS_PER_VOLT = 17 x 1,500 / 1,300 = 19.61
Set the new value in the BATT_AMP_PERVOLT parameter and save to your copter
Fly to check, repeat until you’re happy the new value gives consistent readings
I don’t have the buzzer connected but the led on the here 2 flashed during the failsafe. I’ll adjust my fail-safe parameters so that it won’t happen until the battery is a bit more drained.
@xfacta, @dkemxr, I’m trying to set up my power module, the hex power brick that came with my cube black. I have the multiplier t 12.10 and it measures around the right voltage. But it fluctuates a lot. Now it’s at 24.98. It should be at 25.05 but each time I unplug and tnah plug my battery in again. I shows a slighly different voltage. Now, after a power-cycle of the power module, it shows 25.05/25.06 volts.
Also, when i plug in a 3s battery, It shows 12.35 when tha actual voltage is 12.49 volts.
Is this normal? Do the power module need some time to adjust to a new multiplier for some reason? Is the power module signal very susceptible to noise from the battery wires or something?
Set the voltage multiplier so the reading is accurate at a low voltage, like with that 3 cell pack.
It doesn’t really matter if the reading is s bit out at higher voltages.
Definitely don’t change the calculated failsafe values.
My critical fail-safe is still untouched. It was the low battery failsafe/warning that I lowered. It’s set to do nothing so all it dose is to send the telemetry warning.
So if I set it to measure correctly at lower voltages, and I use the voltage meter to know when to land. Won’t that be dangerous if it reads wrong at my 6s battery voltage??
If you have a bench power supply you can use that set to 20.0 volts (or similar) to calibrate the power module (voltage multiplier) so that the reading is most accurate around the critical battery voltages.
It doesnt matter if the reading is a little wrong while the battery pack is fully charged.
ok, My sky rc battery charger had a 12v power supply, that’s the closest I can get with a power supply. I got the value quite close. But moving around the wire and unplugging than plugging in the battery again can cause it to measure another voltage. Even if the battery is at the same voltage and the multiplier the same. (I measure the battery voltage while it’s connected to the module to set an accurate value)
I tried auto-tune today, with no success. It flew better on the settings before the auto-tune than after. It’s quite stable, although when I fly forward or sideways a bit faster, I can hear a steady oscillation occurring.
Also, when doing some maneuvers, I can hear a sort of crackling sound. Like crck crack crack, with a frequency. So not a constant sound but more like something is moving on the copter. I increased the dmag compensation but it didn’t help.
It also clipps like all hell on the third IMU. I flew hard but it should be able to handle that just fine.
The log might be quite useless since I didn’t carry out the maneuvers systematically.
I could do another flight tomorrow and test for different things if needed.
IMO you have 2 options.
A) Reset the parameters back to the attached and fly it as is and forget about Auto Tune (perhaps some minor manual live tuning) Flying good.bin.param (17.0 KB)
B) get a handle on those very high vibrations with some mechanical re-work and then try Auto Tune again. I would not suggest running it at the .07 aggression you set but just my opinion. Too many times have we seen a bad Auto Tune with aggression too low.
I ran it on 0.1 before that. But with no good result either. I changed to 0.7 just to see if a difference would change the outcome. It didn’t.
I will probably go back to the previous settings, but the vibrations will brig down performance.
I saved a picture of my extended tuning page. Can’t I just sett all settings back to what they were before auto-tune? Or does auto-tune affect other settings as well?
I think maybe my soft mounted motors could be causing more problems than I taught (the crackling noise). They are aluminum and the only other once I have are the standard tarot plastic mounts. Should I still switch to the hard-mounted once? To maybe help the vibration issue?
Didn’t we already talk about that? I think for sure you would want to do that. You want high rigidity everywhere except some isolation for the FC. Whether it’s internal or external isolation depending on the FC. My best performing craft have super rigid frames and super gumby FC mounts*. The only FC I have with IMU isolation is an older Kakute F7 AIO and it’s done poorly on that board.
*Some will say that you can have a too compliant FC mount but so far that has not been my experience. There are mounts supported by 4 O-rings and those have worked well for some.
I tried to convert the aluminum mounts to hard-mounts but was not successful.
I’m afraid that the plastic tarot mounts will break or twist on the arm since I’ve heard so much bad about them.
But I could try them tomorrow and test fly them for a vibration check
I haven’t got a hold of new mounts for the motors. The only once I have are the plastic once and I don’t trust them at all. Have had one crack and bend on me in flight. I’ll try to get some aluminum once to try out.
I also got a hold of some 18 inch foldable propellers. The drone takes up so much space right now so I wanted to try out some foldable. The 17 inch I have does not come in a foldable version, only 16 and 18 does.
So, first of: Do I only need to change the mission-planner helper and do some fine tuning or do I need to change more?
Second, i use t-motor mn4014 330kv motors. T-motor only tested them for 15 to 17 inch. Based on the motor kv and voltage (6s lipo), do you think I can test 18 inch?