I’m running the Pixhawk Cube Black, on a mini carrier board, on a 3d printed frame, with a 4s 1.5Ah battery, 50A 4-in-1 Tmotor Pacer ESC, iFlight XING 2005 2550Kv Brushless motors running 3 blade 5030 props.
On my initial test flights its got a really weird low frequency wobble. I’ve done the gyro noise filtering procedure, and can see that my motor noise is around 150Hz. I’ve set the harmonic notch to filter this out and it disappears completely. However, i have a huge Gyro and Acc wobble at 15Hz.
I’ve mounted my FC on a 4 x rubber cushion plate, in a hope that this would help, but it hasnt.
I’ve put in a 15Hz center freq Static Notch Filter, with 7Hz BW and 20dB attenuation and this doesn’t really help either.
Any ideas on what i can do to stop it wobbling?
I can tell that once it stops wobbling its going to fly reaaaaally nicely. It flies pretty well even with this crazy wobble.
15hz is also way too low for any filtering, on a small quad such as that the true vehicle dynamics will be around there. 50hz is about as low as I would go with any filters. It could just be a I term oscillation. I would hard mount the cube, turn off all notch filters and get a log with PID logging turned and share it here.
You vibrations are extremely low, which is unusual for a small quad. But if the flight controller is over-damped it wont be detecting all the frame movements, or worse, lagging and correcting out of sync.
Before removing the soft mount platform you could try the old trick of sticking some ear plugs inside the antivibration balls, see if that stiffens it up a bit. I’m not confident that will be of much help though.
Here’s a problem, maybe not THE problem but definitely something:
MOT_THST_HOVER,0.135
MOT_SPIN_MIN,0.15
Reduce MOT_SPIN_MIN to about 0.12 or even less, where it’s just starting to produce thrust. It’s got to be significantly less than the hover thrust value. Or add a bit of weight.
Check MOT_SPIN_ARM too and see if it can go a lower, just so you can get that MOT_SPIN_MIN as low as possible.
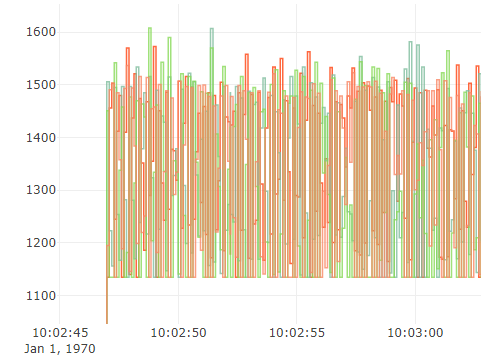
You can see here motors are going to minimum frequently to try and maintain altitude and stability without heading to the moon
I’d try that, in the interests of testing one thing at a time to nail down the major problems.
If that doesnt help entirely, I’d probably try reducing these a bit and see how that changes things before going all out on PIDs
ATC_RAT_PIT_FLTD,30
ATC_RAT_PIT_FLTT,30
ATC_RAT_RLL_FLTD,30
ATC_RAT_RLL_FLTT,30
ATC_RAT_YAW_FLTT,30
INS_GYRO_FILTER,60
It’s a pity you didnt have BLHeli32 ESCs, then you’d have the harmonic notch filtering without any messing around.
Thanks xfacta. One thing I noticed is if I up the throttle a bit then the quad goes up like a rocket. Like nothing I’ve seen before. So maybe it is just overpowered? Which makes sense when thinking about my arm spin and min being too high? I did think about adding weight to see if that helped. I might try my bigger battery.
I followed the ardupilot basic tuning guide for the ATC RAT figures. But maybe I got something wrong there. I’ll have a look again and try the figures you suggest.
It’s really annoying, as the spec of the ESC says “BLheli 32” but none of the configurators will recognise it, and I can’t flash any new firmware.
Yes, add a bit of weight too.
If the ESCs do BLH32 then you’ll need to use the AUX outs on that Cube, and set up the BLH telemetry too. Then if your radio system allows it set up Yapuu telemtry - you wont go back!!
If you get those working you’ll be thinking about setting them up on your car, kettle, bicycle… Why doesnt everything have BLH telem and Yapuu telem?
Yea as Shawn says switch to the Aux outputs and configure a serial port for ESC telemetry. Assuming you have the ESC TX pin connected to a serial Rx input. You should only need to set the SERVO_BLH_AUTO parameter to 1. Set those others you changed back to default (0). And with that ESC and motors set MOT_PWM_TYPE to a Dshot protocol. 1200 will probably work but I would start at 300.
If ESC telemetry fails for whatever reason the next best reference for the dynamic Notch Filter is FFT. However that requires a Dev version of firmware so personal choice to use it.
I recommend just starting over delete the config. Then keep the PID’s stock and fly it. if you get a twitch dial back the pid a tad manually with the slider, then go to the “roll” pid setting and reduce them numerically a few.
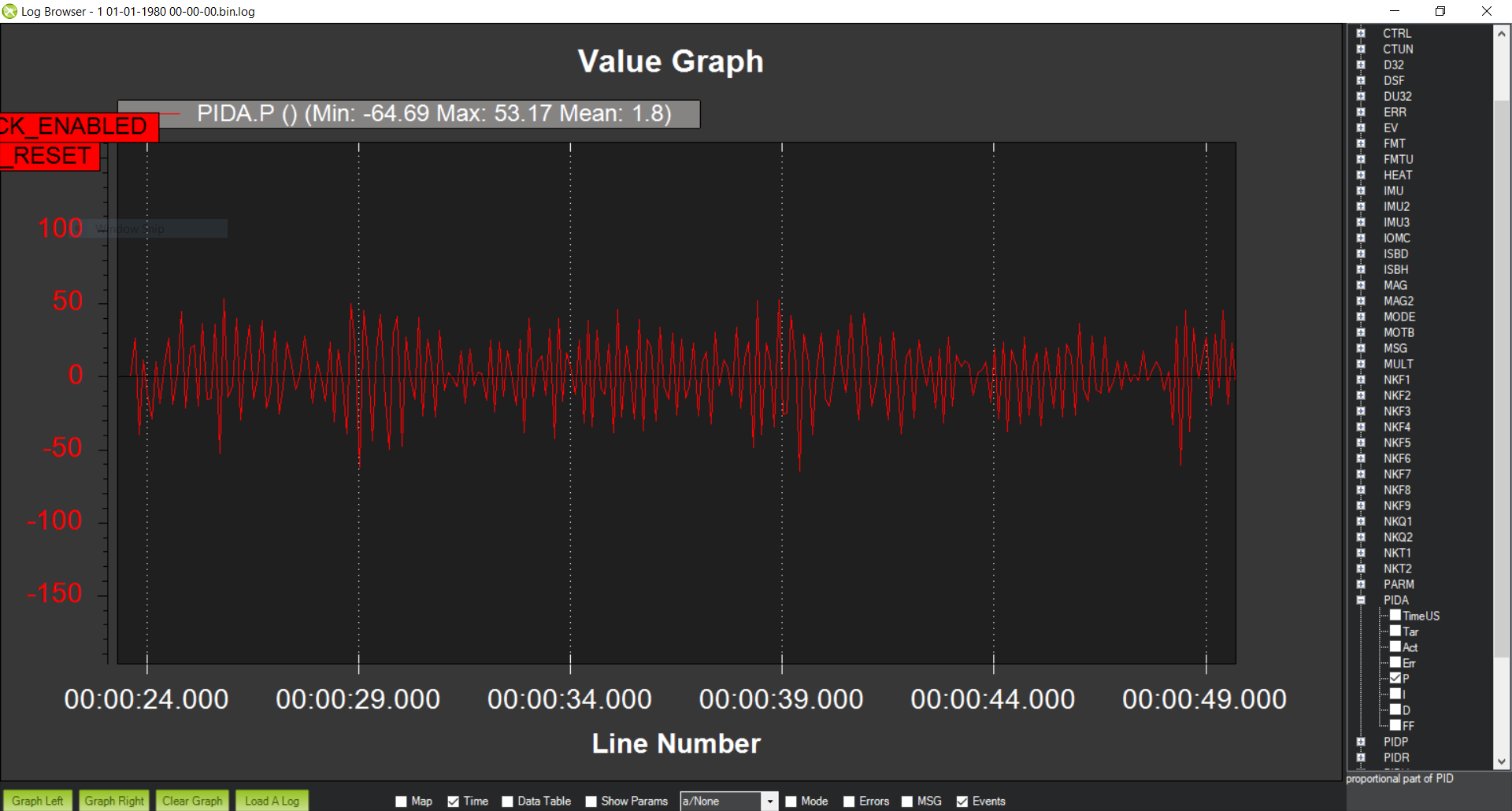
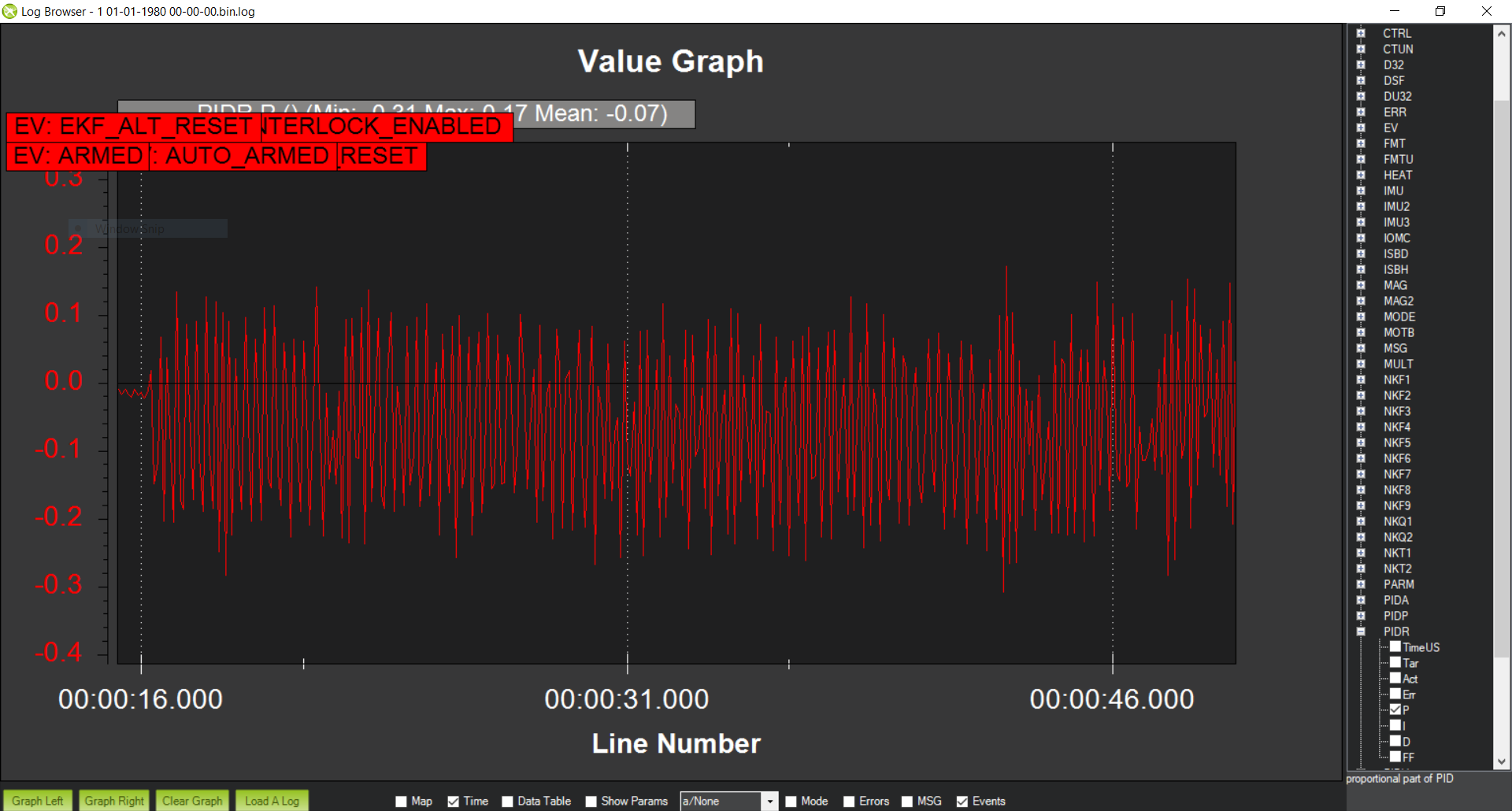
It’s basically like its doing a motorbike tank slapper in the air - which suggests PIDS arent right? It’s oscillating and overcompensating around the wanted level value, but never gets there?
Can anyone suggest some reasonable PIDS to try? I’m assuming autotune would be absolutely pointless with it in its current situation.
Here is my log from my most recent flight - where it was at its worst, and randomly fell out of the sky.
I don’t see that you did that. The Rate and Gyro filters are at default. That won’t work for a 5" quad. Rate filters should be at 40Hz and Gyro at 75Hz to start. Run the Mission Planner plug-in (Alt>A) and use those values.
Smaller quads (6" and less) will not be stable with default filter settings no matter the PID values. Just setting the Gyro rate to 75 would probably make it flyable but set all of them as prompted. The Plug-in works great for props up to ~26". These are settings to be done before the maiden flight.
Cheers - never knew about that plugin, very useful. I followed that and halved all the PIDS (as recommended on the ardupilot wiki) and it flies much better, but still have the LF wobble (albeit much lower amplitude.
I then changed the battery pack out for my 750g 4s whopper and voila! Flies perfectly - no noticeable wobble or vibration. Motors are much cooler as well.
Trouble is, i really don’t want to add this huge battery to this small quad. I am going to be adding an FPV camera, and my GOPRO 6, and i suppose i could add another small 4s battery for longer flight times. But even with the 750g battery added, the Hover throttle is still only around 0.2.
Another problem i’ve got (which might have effected the plugin wizard calcs) is that my ESC telem is not reading correct battery voltage (it’s showing ~11.5V) instead of the 16.8V when battery plugged in. The mission planner battery monitor page always shows ~11.5V no matter what measured voltage or multiplier I put in. Strange.



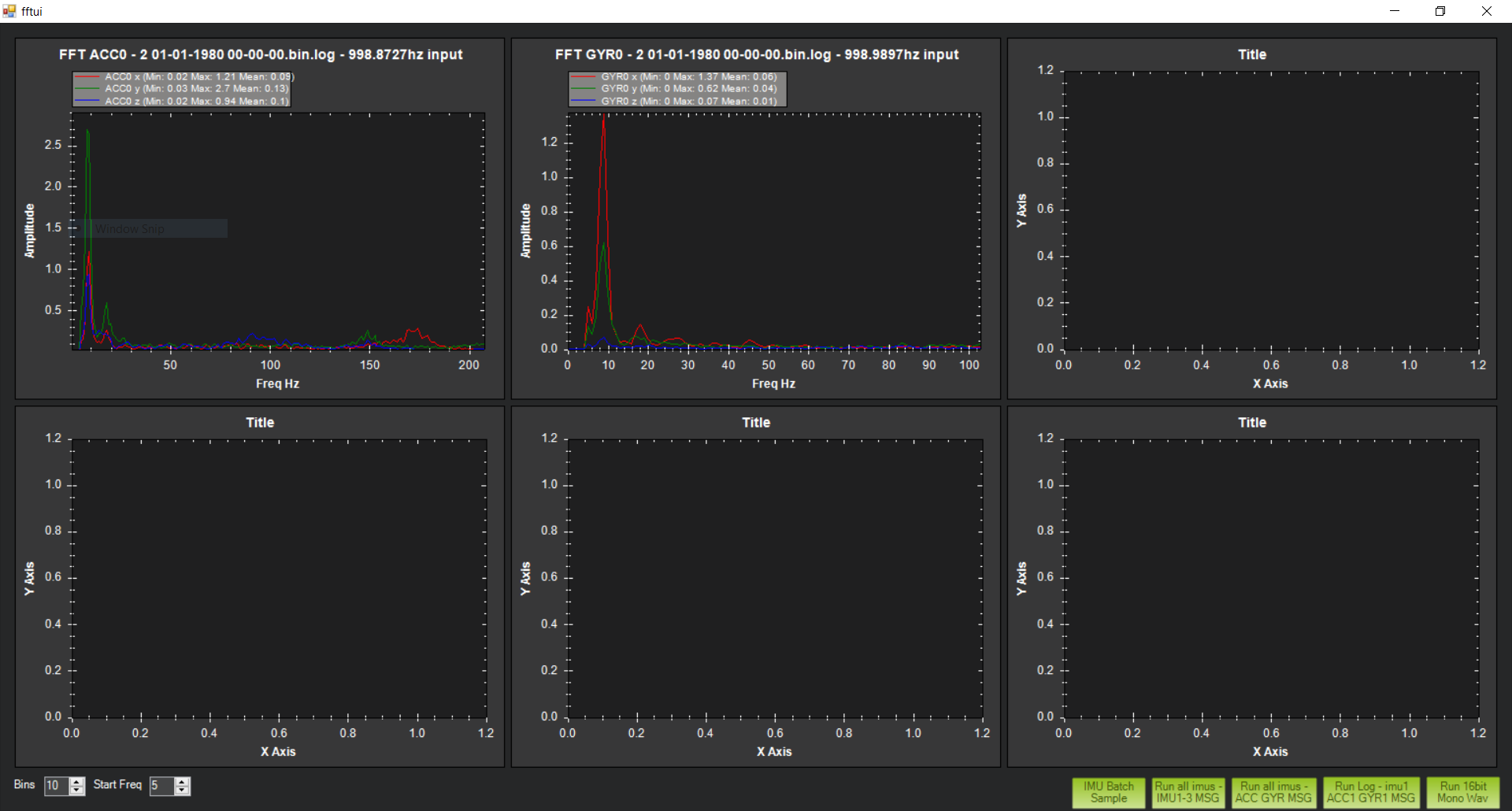
 Here’s a photo of the FFT - the freq has moved down to about 10Hz, but the amplitude is way worse.
Here’s a photo of the FFT - the freq has moved down to about 10Hz, but the amplitude is way worse.