In your last log you don’t have the notch enabled. You must get the notch working to have any chance of this working well.
For smaller quads higher filters work best - e.g. INS_GYRO_FILTER at 90 hz say and ATC_RAT_RLL_FLTD and ATC_RAT_PIT_FLTD at 80, but don’t do this until you have the notch working.
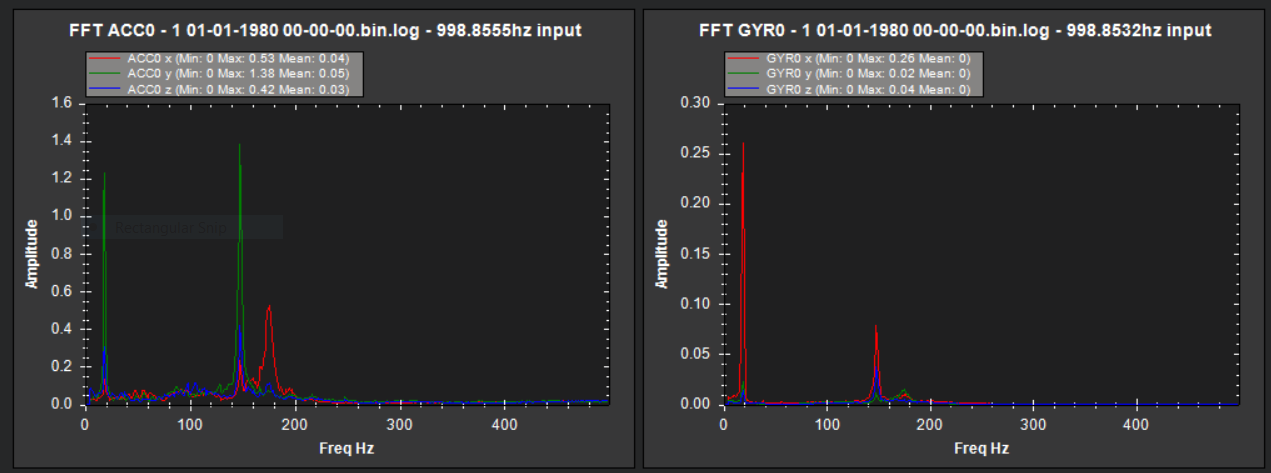
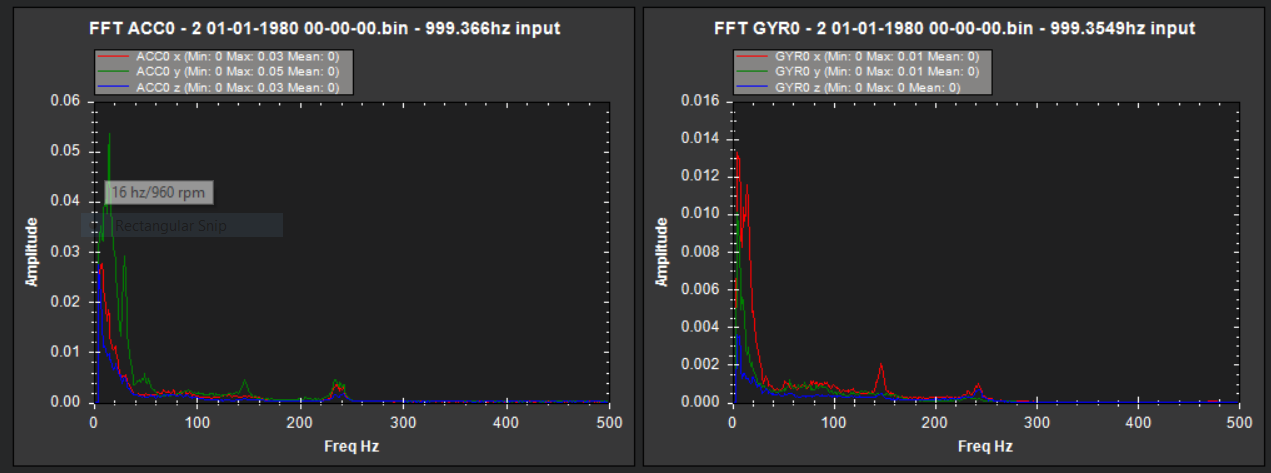
Thanks Andy - I mistakenly thought that setting the HNTCH mode to ESC Telem would negate the need for me to input the Centre Frequency. I changed the centre freq to 235Hz, which was the biggest peak in the FFT analysis. (it was set to 80Hz in the previous screenshot).
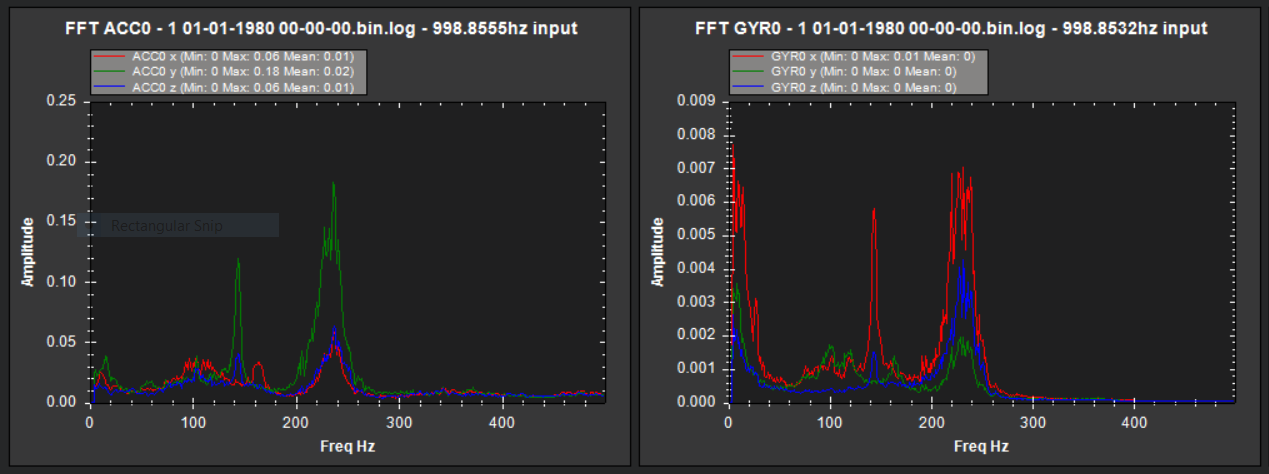
This is the FFT with the HNTCH set to 235Hz, 116Hz BW, with the normal lightweight battery.
To me, it doesnt really look like the HNTCH is doing its job - but then looking at the scale of the Gyro noise, its down in the 0.001’s, so that seems very low?
My gyro filter is currently set to 75Hz, and the ATC_RATs are set to 37.5Hz as per the Alt+A plug in that Dave recommended above.
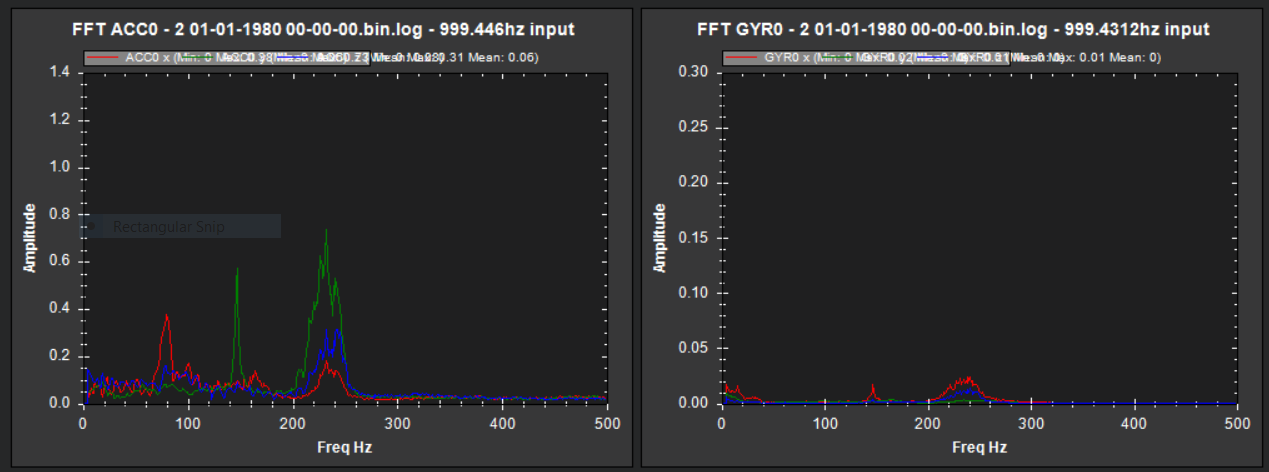
Your notch is not doing anything (look at CTUN->N that’s the notch frequency in 4.0.x) because INS_HNTCH_FREQ is used as the lower bound and you are never hitting that at 235 hertz. Set it back to the default of 80 and BW of 40 and try again. Also make sure you have the number of motor poles set correctly for your motors
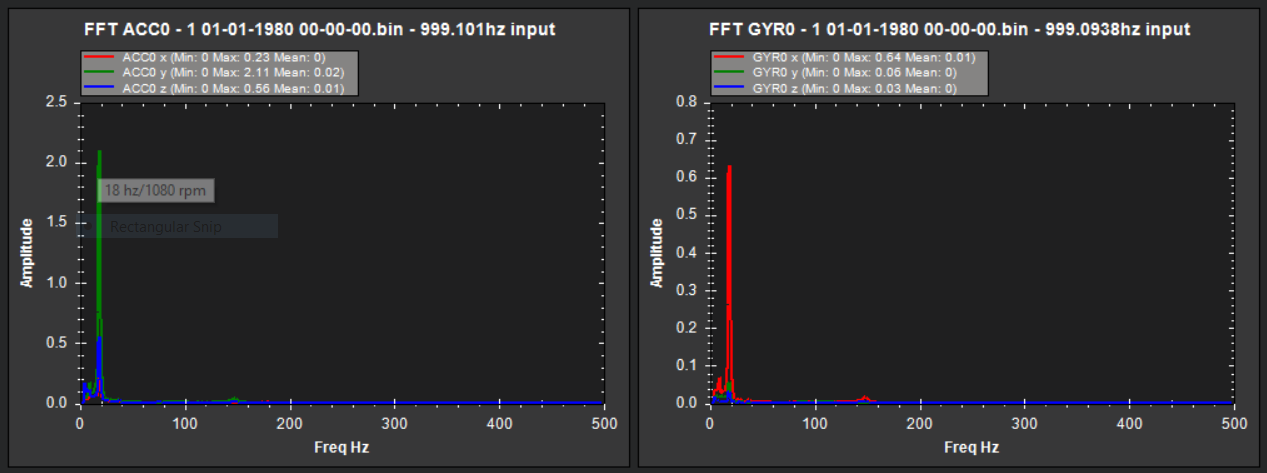
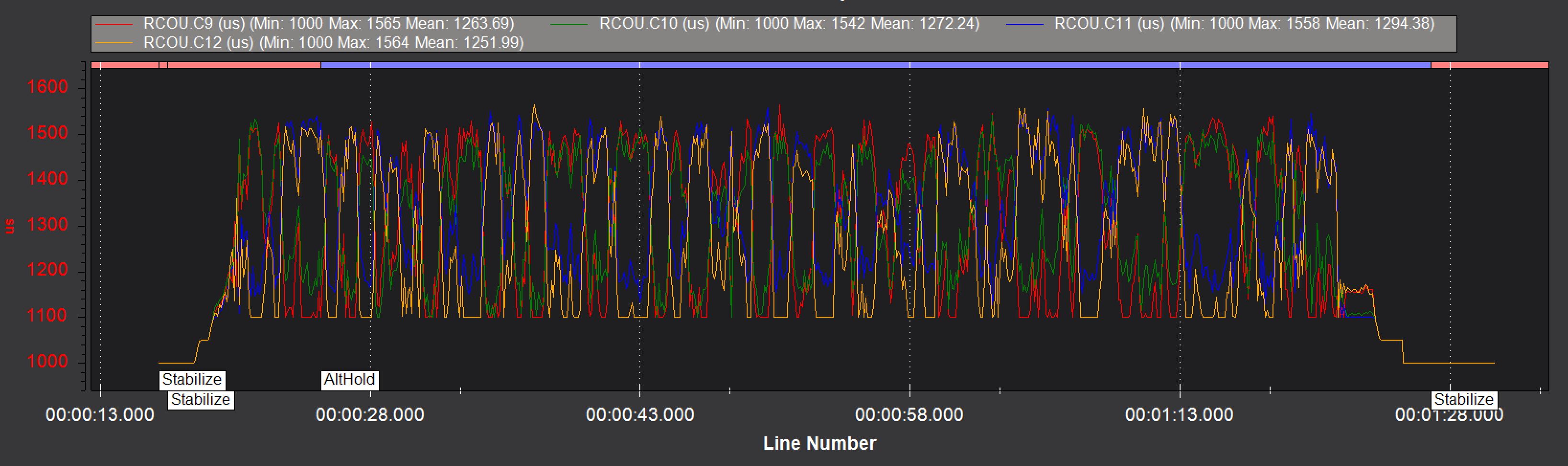
I realised earlier that i had been running the flights with the sampling as pre-filter, rather than post filter. I have set INS_Log_Bat_Opt to post filter now and have no HF vibrations at all. However, still have the whacking great 15hz wobble.
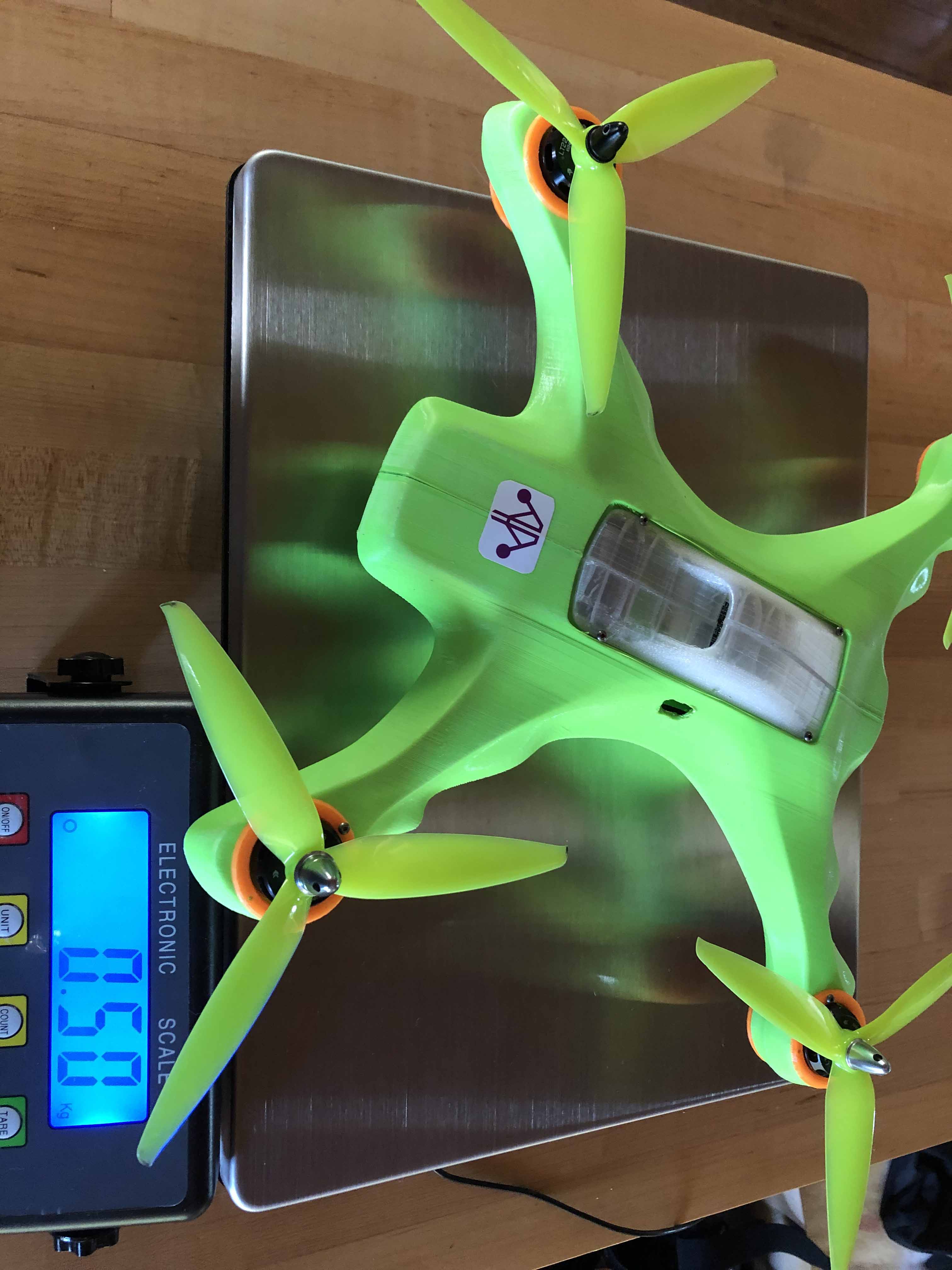
It’s usually the last item I buy for a new build. Plan the build for power (2S-6S, etc) and when it’s done weigh it and buy the biggest battery it will accommodate with respect to a proper thrust:weight.
Yea,not a bad idea. I used some 5.1x2.5 tri-blade on the last 2S build. Under big power like he has they would flatten out. I count that as an advantage here
I made a lot of this size quads and always need to fine tune one axis normally roll… Since you done a lot of changes I recommend deleting the config and starting 100% over, fly it and if you have a twitchy quad manually reduce the pids using the PID slider then fly it again if you have one axis of vibration that stands out manually reduce that axis. For this size I would recommend a smaller FC like the mRo PRP or the Control zero even the x2.1 777 . For 5" props 2000 KV is a good fit even the 1700 motor then you can go up to 6" or 7" for testing. once your happy you can try the other tuning tricks if needed.
I think it’s as Dave says above - its too light for the corresponding MOT_SPIN_MIN - so it basically has to turn the motors on and off rapidly, just to stop it rocketing into the sky.
Got a bigger battery and adding the camera at the mo for more weight - should help if i can get my MOT_THST_HOVER to around 0.2.