Should have been easy as previous efficiency tests gave 2.0Wh/Km, but during this test I got 2.5Wh/Km. I suspect that during the previous test the 4 dead props stopped aligned with the airflow but during this record attempt they all stopped across the airflow of course.
I have some ideas on prop alignment but would need help from someone to modify AM32 firmware. I may make another post about that.
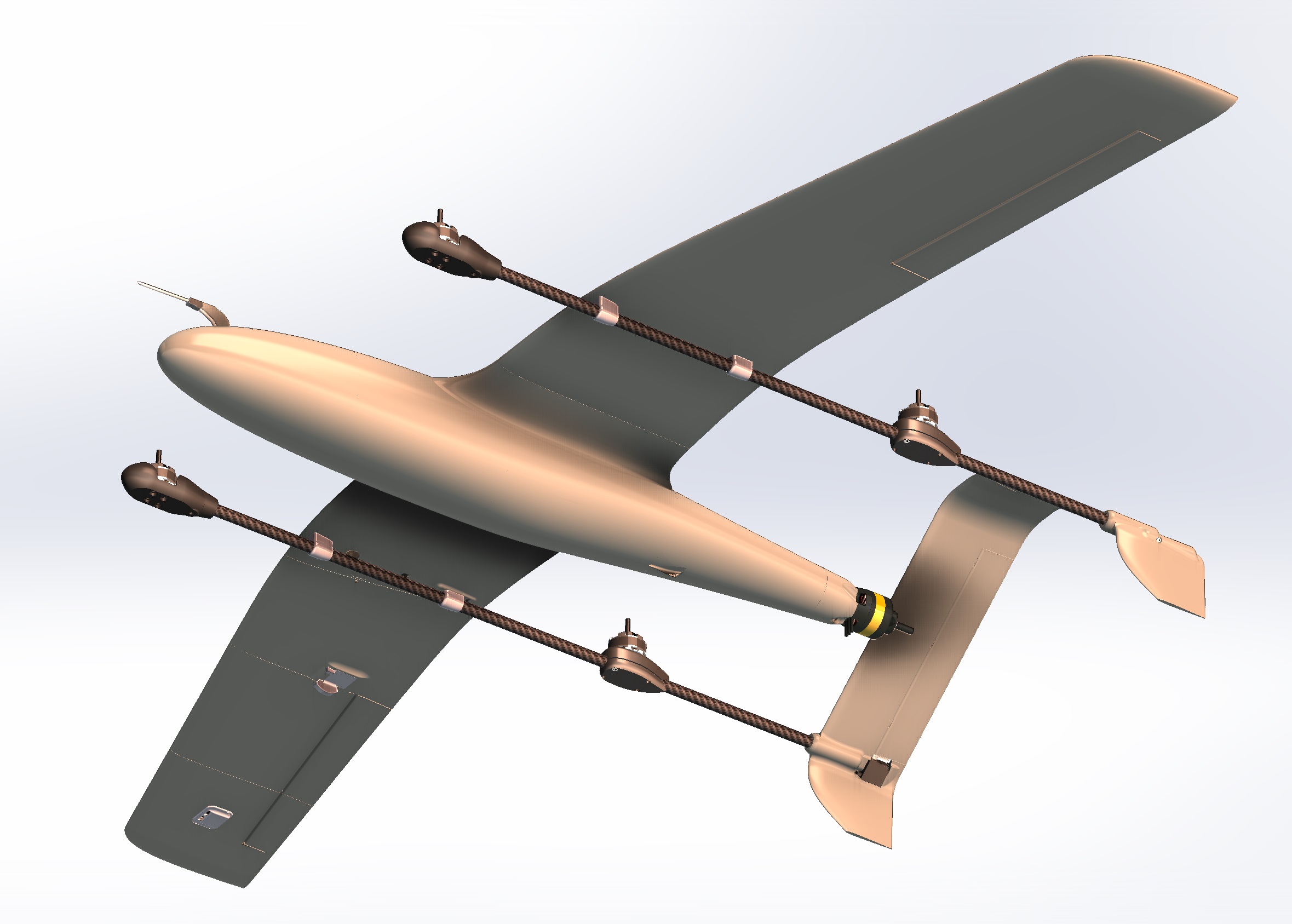
A beautiful VTOL! Unfortunately, without a Facebook account, I can’t follow your link.
I think your idea of aligning the quad props longitudinally during level flight is great. Please understand that my following comments on efficiency measurement are meant to be constructive and should not prevent you from aligning the props
I would question your assumption that an unfavourable propeller position reduces efficiency by 25% (with respect to ground distance).
In my experience, having all four props aligned lengthwise with normal ESCs would be like winning the lottery. Having all four props aligned crosswise on the next flight would be like winning the lottery twice in a row.
I mention this because I have attached the FPV camera to the vertical stabilizer and can see the quad propellers.
The wind resistance will probably be lower with “close-fitting” pops, but not by 25%.
Due to the varying wind speeds on the days when measurements were taken, the air distance is also increased if the measurement flight is first carried out against the wind and then back with the wind .
Formular: airspeed² / (airspeed² − windspeed²). At 17 m/s airspeed and 7 m/s wind speed, the total air distance for the round trip increases by 20%. In summer, significant measurement errors are possible due to thermals. Inaccuracies due to calibration errors or other measurement errors in the airspeed sensor also reduce the accuracy of efficiency measurements.
With a 25% difference between your two flights, I would be more inclined to think that there are other causes that have reduced efficiency.
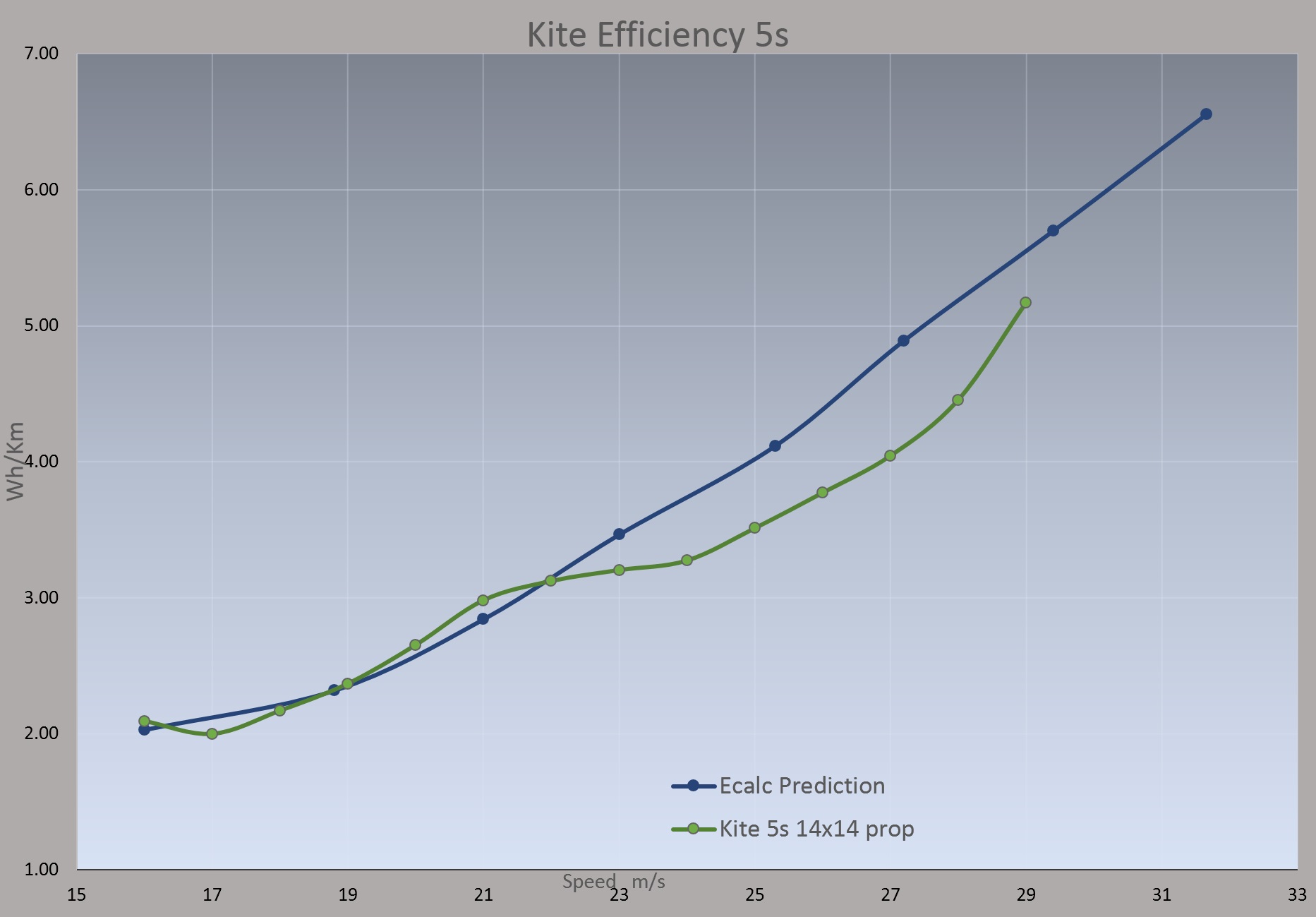
Hi Rolf. Thanks for the compliments on the plane. On the 100km flight, as it passed overhead, I could see that none of the props were in a favorable position. Previously, I did a ‘speed ramp up test. 1.5km legs and at each turn the speed was increased 1m/s. The power was measured during the straight legs and based on airspeed.
I also later did a 1 hour test in a large circle at 18m/s and the efficiency agreed exactly with the ramp up test. This 100km is a bit of a mystery. It was flown at 17m/s so efficiency should have been 2.0Wh/Km. Some of the efficiency loss is because of the 3 sharp turns on each lap and some probably because of unfavourable prop positions but I don’t believe those 2 things account for an efficiency that jumped to 2.5. There was a bit of dried mud on the drive prop. I will do more test flights
Anyway about aligning the props. Did you see my other thread about this (in VTOL)?
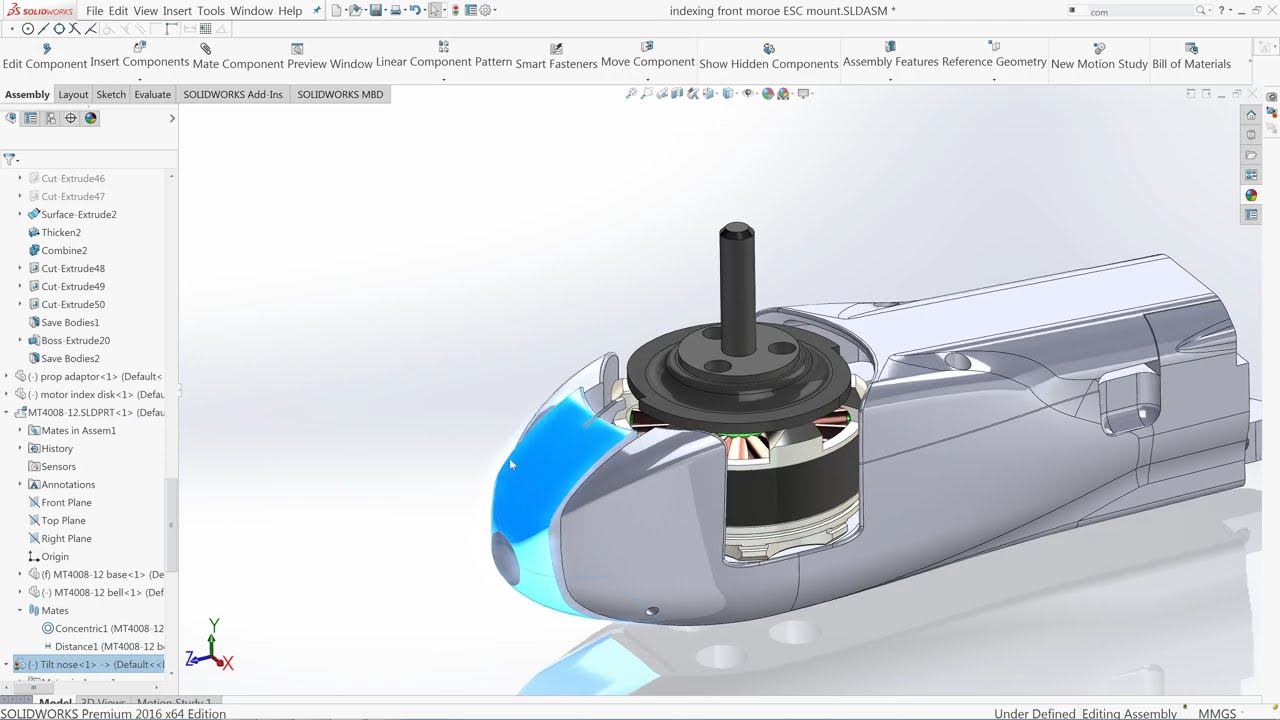
I would like to try editing AM32 ESC firmware so that instead of the ‘lost drone beep’, the ESC would do a slow sinusoidal move in reverse with a timeout. I will try myself but code is not my strong point so am trying to get help. Im convinced it will work. The mechanical stop would only engage in reverse and only when forward airspeed moved it back. I have already done a feasibility cad test. This is my new motor pod designed to take the Vimdrones DroneCan ESC.
I think it would work with its own weight. In VTOL the propwash would also help to keep the pawl open. It would need experimenting to get the pivot in the right place.
Hey Rolf, im having a discussion on github AM32. Seems the Alaka motors guy in not convinced at my alignment idea and says I should do it with Dshot commands, which I already tried.