I want to confirm something about using zed f9p gps rtk module. I need two of them, one for base and other for rover, a board for each so that the rover is connected to the flight controller and so that the base is connected to an antenna. Is this setup correct or is it lacking something?
You need telemetry from the Ground Station to the craft to send correction data, Google “Arducopter RTK” and you will find several use cases. Alternatively another option is if you have Ntrip service locally available you don’t need the base Module just an internet connection. I have free service where I’m located.
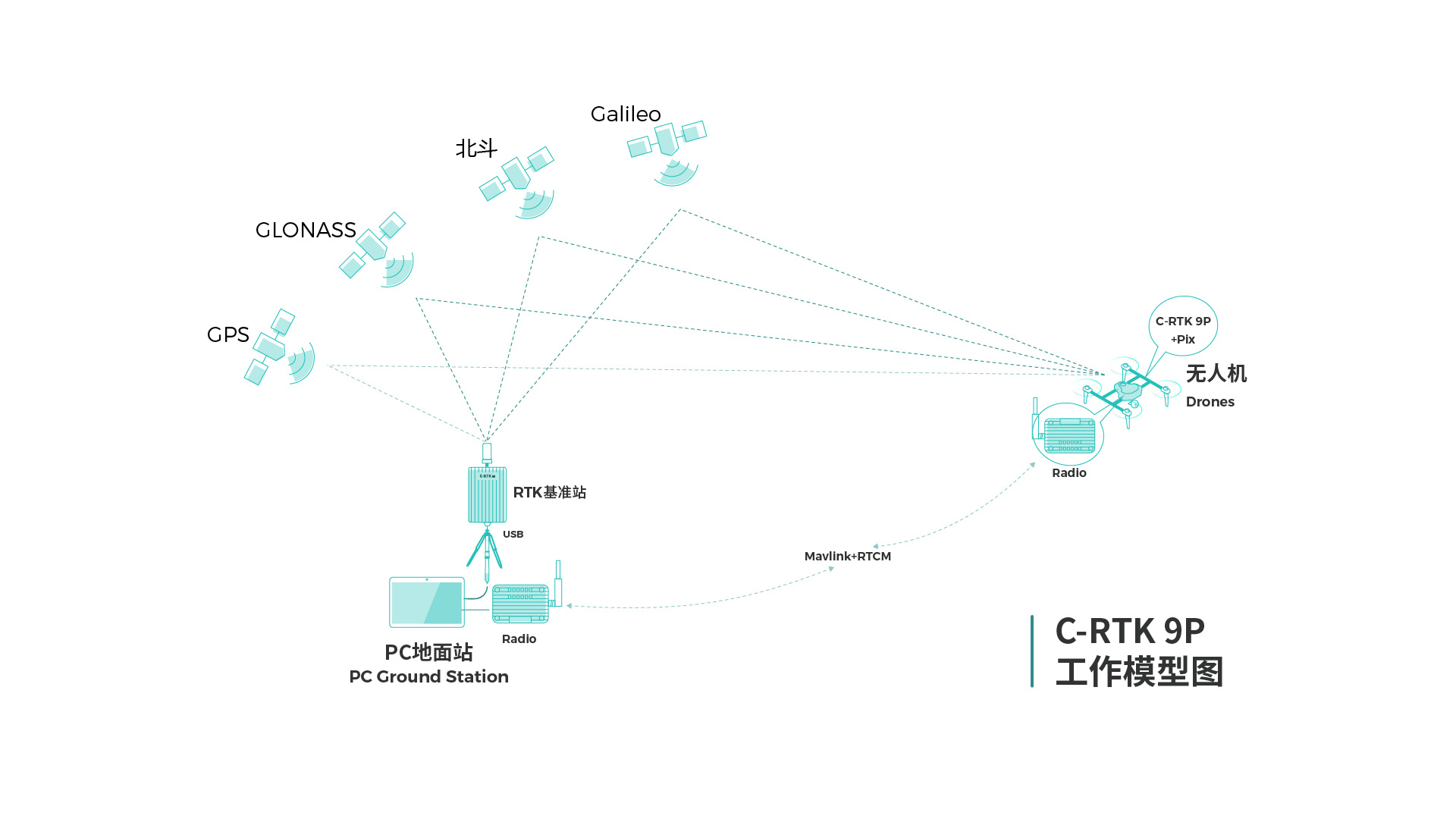
This picture shows the rtk workflow.
@GRS26
Hey @cuav_le
Can C-RTK F9 do PPK?
no, it does not support ppk, we will release a PPK module in the near future.