@xfacta @dkemxr
I’ve also thought of using additional dampening. I’ve been avoiding doing so since I don’t know how the cube’s internal dampening would react to it.
I have some more Ideas before I’ll take the copter apart. If possible I would like to avoid that since it’s so much work and I’m afraid to ruin the bolts.
I’ve conducted two more test flights. The first are just in the same configuration as the log I posted at the beginning of this topic. The weather in that log was quite windy and my last flights were dead calm. I wanted to make the results more comparable so I did two flights.
Note: The motor output in the log and the RATE out suggests a slight imbalance. I believe that might be my battery placement since the drone weighs 5kg and 4.5 with no landing gear and batteries weigh around 4.2kg I bet a slight misplacement could result in some noticeable imbalance.
As smart as I am, I also forgot to change the settings you guys suggested… I’ll do those for my next test flights.
This first one is with the landing gear attached and no changes to the drone.
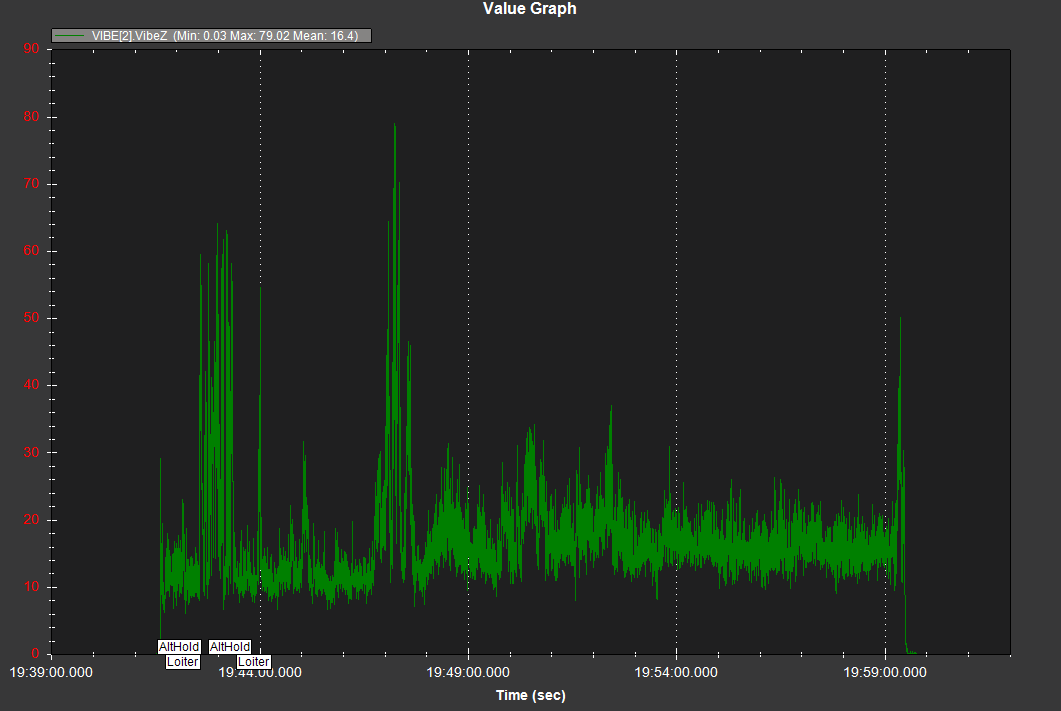
My own analysis: The vibrations here are still below the recommended maximum (30) on both the isolated IMUs but still high as all hell on the non isolated Z axis. I also have a bit increased X vibration in relation to Y. This is with landing gear in their retracted position.
The X and Y are also a bit higher on the non isolated IMU reaching for and a bit abow 30 at one time.
This test-flight is with no landing gear on the drone:
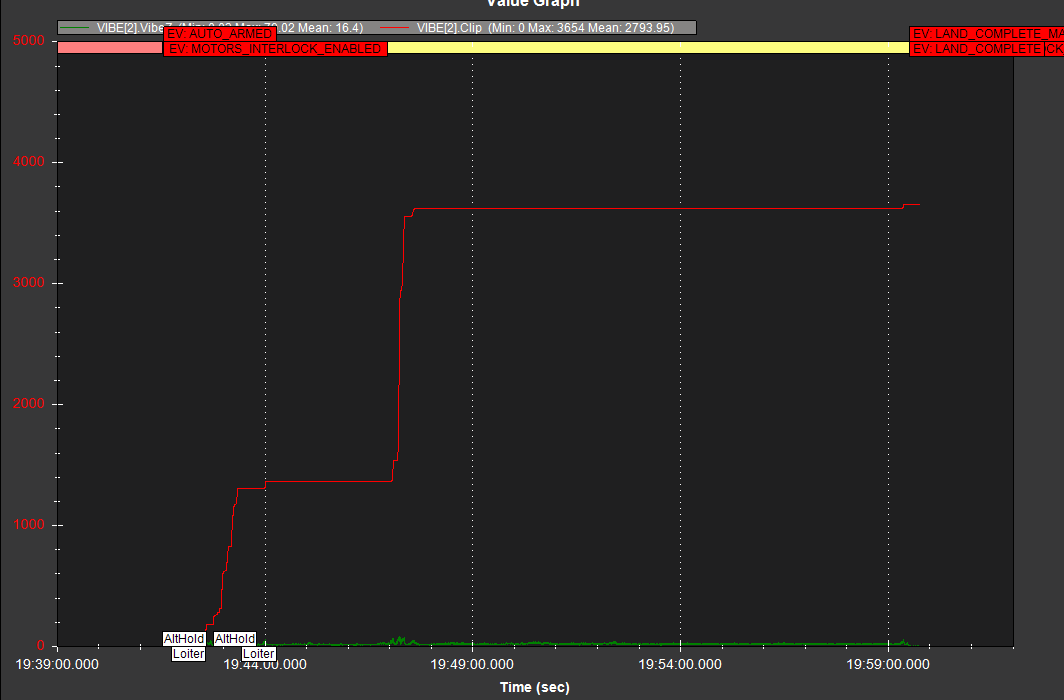
This log is quite long with a long hover at the end. I needed to drain the batteries a bit more down closer to storage level. The isolated vibrations are better here with the Y and Z being really great. The X is much higher in relation but still within a manageable range. There are some vibe spikes that occur with larger pitch and roll input.
The non isolated one is also good on Y and X. The X is lower here than on the isolated one so I might be hitting the cubes internal dampening resonance frequency a bit. The Z is also much better here but I hit spikes that are concerningly high.
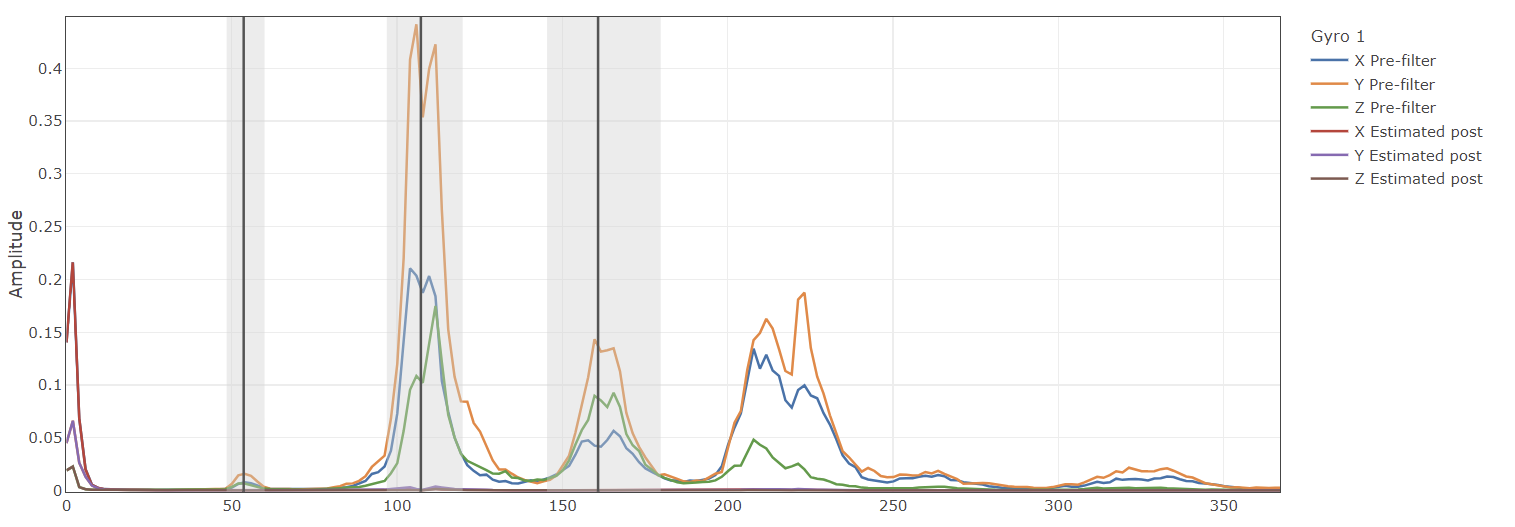
The RATE.out plot also looks less noisy at hover.
So, I have some more tests I could do to gather more test data. I’ve been running the regular T-motor 22inch carbonfiber propps for these tests fitted with the T-motor quick attach adapter.
The adapter came with a wave formed washer I didn’t install, since it got quite hard to push the propp into place with it on. That might have been a mistake and I have installed it on all adapters now. I plan on making a test both with and without landing gear with this washer installed.
I could also make a test with the adapter removed. And attach the propp directly to the motor. This could help since adapters usually are not the best. It would bring the propp very close to the arm which might not be good but still worth a try.
Next I have my old set of foldable polymer propps. I have used those before I got my new carbo propps but maybe I should test them with and without landing gear in the same environment as the other tests just to get the data.
Next step would maybe be to try to fix my gps masts better and see if thty makes ant change at all. just to be sure.
I’m not the best at log analysis so any input is greatly appreciated. I’m sure I’ve missed things!