I have an X8 with 16inch props and around 4kg AUW. It’s running 4.03 with Harmonic notch enabled and configured. My FFT graphs turn up pretty clean. The copter is pretty well tuned and besides the vibes issue all is good.
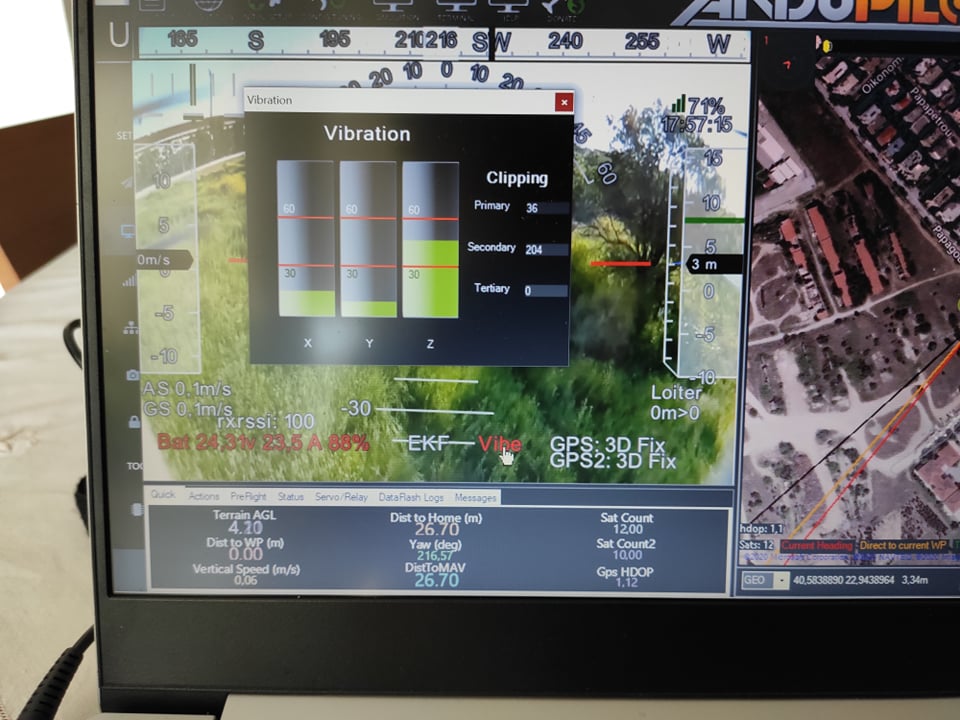
However I am encountering the following problem: Very high VIBES on Z axis… See the picture below:
Below is all I have tried so far in order to fix the issue:
1. Some suggested the props are too close too the arms - so I moved the engines another 11mm higher. - No luck and almost made it worse I believe.
2. I added some aerodynamic cover on top of the arms to lessen the above effect even more - No Bueno
3. Another suggestion was to stiffen up the frame and that this is cause by frame flex… Ok added an extra 2mm. brace (not the best but definitely made it a bit stiffer) - Close but no cigar.
4. Added about 20grams of lead weight on top of my softmounted Pixhawk V1 - That did something! XYZ vibes dropped proportionally, however Z was so bad that I still get clipping and sometimes hit 60 on the graph…
At this point I’ve run out of ideas so I resort to you guys, hopefully someone has encountered something similar and can enlighten me.
Get rid of the flexible motor mountings, that is a bad idea, and check prop balancing.
(I encountered very badly balanced series of t-motor carbon props in the past)
It is your call, but my experience is that the motor and frame must be one rigid structure. All control algorithms are based on that assumption. If you allow motors to resonate differently from the frame then you have to deal with feedbacks.
There’s a fair difference between CW and CCW motors, indicating the flight controller is fighting some physical yaw, like motor mounts are not all perfectly aligned.
Z vibes are still a bit high, you might try changing:
anti-vibe foam mounts, less/more/different
I see you already tried lead weight, maybe try more or less
These need a bit of experimentation to find what helps or makes it worse.
These wont fix vibration issues, but you could set these parameters too:
ATC_THR_MIX_MAN,0.5
PSC_ACCZ_I,0.52
PSC_ACCZ_P,0.26
MOT_BAT_VOLT_MIN,19.8
And my personal preference would be these:
BATT_ARM_VOLT,22.1
BATT_CRT_VOLT,21
BATT_LOW_VOLT,21.6
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
Also I highly recommend doing the Compass/Motor calibration
Hey Shawn, thanks for looking through, I have noticed the cw vs ccw issue and fixed it by realigning the motor mounts (those darn tube arms!). I have the default pixhawk foam, do you have any suggestions for different materials ?
I’ll set my MOT_BAT_VOLT_MIN to a lower value like you suggest maybe it will give me a little better PID scaling.
However I wouldn’t go any lower on my BATT_LOW_VOLT since I am using BATT_FS_VOLTSRC set to 2 so it’s sag compensated already.
I’ll also do the compass motor calibration since I had noticed on full throttle I’m getting a slight MAG discrepancy.
But most importantly lets hope I can figure out a way to fix those VIBE issues