Looks awesome, and you know I am going to copy as much of what you have done as possible, eventually… 
2 Likes
Very interesting discussion, very helpful and useful, thank you so much for all of you , I am going to try GPS for yaw, but it looks challenge.
1 Like
@lumono, It really is easy now that the firmware is working well. You have to decide how you want to get the RTCM3 corrections from the ground-based Base GPS to the Moving Base GPS on the vehicle. Beyond that it is quite straightforward.
Personally, I would recommend that you NOT use the Ardusimple daughter board for the 2nd GPS. From what I understand, the way it connects the UARTs between the daughter board and the main board is not ideal. If you use two Ardusimple RTK2B boards, you have the flexibility to connect them any way you need. Of course, it takes a little more real estate than one stacked on top of the other. You may be using something completely different, though, such as one of the HERE devices.
I have used both 2 Ardusimple RTK2B boards and also 2 Ublox C099-F9P eval boards. The C099-F9P has a jumper you have to get right, but otherwise works the same as the Ardusimple boards. They are a little bigger. Both work well. The Ardusimple RTK2B works well and has a GH connector that is ready to connect to the flight controller with readily-available cables.
2 Likes
@lumono, I’ll second Kenny’s advice. Just get two of the SimpleRTK2B basic starter kits (or 3 if you want to use your own fixed base), and you’ll have more flexibility with a little more ease of configuration. Right now, it’s actually cheaper to get two the basic starter kits than one of the RTK+heading kits anyway.
2 Likes
On the subject of my own project, I’ve made some pretty good progress.
I managed to get a few mowing specific features added to the Mission Planner master code branch, and they are now available in the latest beta update.
I’ve also begun a quest to move some of my Lua scripting automation over to the transmitter side rather than gobbling up flight controller RAM. Presently, I use Lua scripts to accomplish the following:
-
Automatically set the parking brake when disarmed or in hold mode
-
Automatically engage the mower blades when a waypoint mission is active and keep the blades engaged when switching between manual control and auto control during the mission (with a switched failsafe).
-
Overload a single channel for arming and ignition, then use that channel state to determine the function of the only momentary switch on my transmitter, alternating between choke on/off, starter engage/disengage (with automatic choke outfeed if it was engaged when the ignition was switched on), and waypoint save.
-
Sometimes just for grins, calculate the sun elevation based on GPS coordinates and date/time, and if it gets a little below the horizon, turn the headlights on (I don’t usually run this one).
-
(and as of today) Pausing auto mode when GPS fix status is worse than RTK Fixed.
I wrote most of these scripts to avoid using up all of the RC channels on a Spektrum 9 channel transmitter. However, I’ve been using a FrSky 16+ channel transmitter for about a year now, and I haven’t fully taken advantage of OpenTX’s flexibility. So far, I’ve managed to move much of this logic over to the transmitter, and I think I even got an automatic choke outfeed function to work.
I’ve also learned a TON about open and closed loop process control as it relates to flight controller tuning. I know some of you follow my YouTube channel, and I truly appreciate the support. I have an even longer backlog of video ideas after all of this, and I’ll try hard to get some of them filmed, edited, and uploaded.
You’d think after a year and a half of this that I’d tire of this project or call it “good enough,” but I find the entire platform fascinating, and it keeps bringing me back to find ways to improve performance. Apparently I’m “that guy with the robot lawnmower” to my neighbors, and I even had a county policeman stop his cruiser, turn around, and start asking me about the project (I was apprehensive that he’d actually been called to inspect the safety of my “operation,” but he was genuinely curious, and we had a great chat!).
6 Likes
Keep blazing the trail ahead of us (me at least) so the grass isn’t too high for us to follow! Pun intended.
2 Likes
@ktrussell & Yuri …I have been watching the forum on the discussion between you &Yuri (great work guys)and I am building a complete new mower to test with.Similar design as my old model from 2017. I wanted all the new technology .I have a question about the GH connector between the Cube and the SimpleRTK2B, you had mention to me a few weeks ago. I bought a new Orange Cube and have two SimpleRTK2B.configured as a rover and fixed base on top of my shop . BUT I don’t see the GH cable you mentioned. The only cable that fits the SimpleRTK2B is going to the Power splitter from the Cube.
Forgive me if I’m a bit confused by the question. There is one 6-pin GH connector on the SimpleRTK2B board that needs to be connected to a serial port on the cube. You can connect it to one of the 6-pin serial ports labeled GPS2, Telem1, or Telem2. Or, if you’re comfortable repinning a connector, you can use an 8 pin connector on the Cube side and connect it to GPS1 (keep the power, TX, and RX lines on pins 1-3, and use pin 8 for ground).
If you’re looking for a specific connector in the Cube’s wiring kit, it may not exist. They do a good job of packing some frequently used parts, but they don’t include a connector for every possible hardware configuration. You can order more connectors from Amazon, Mouser, DigiKey, etc.
Thanks Yuri, That’s is what I thought but Kenny and I were discussing a cable and I was hoping it was in the Orange Cube set, I ordered a Pre-Crimped Cables and GH1.25 Connectors for Pixhawk2 Pixhack Pixracer PXFmini Silicone 15cm Wire from the AMAZON .and I will make one,Thanks again for all your help on the subject matter You and Kenny are the “MEN”
@dwright361, I would have sworn that the Cube Orange kit ( AmazonSmile: The Cube Orange Standard Set (ADS-B Carrier Board) : Electronics) included the right cable, but I have a brand new one I have never opened (for a drone like Yuri’s, of course!) and it does not. It seems to have the GH connectors for the cube, but the other end of each has the older DF13 connectors. I guess I built my own from this kit AmazonSmile: Pre-Crimped Cables and GH1.25 Connectors for Pixhawk2 Pixhack Pixracer PXFmini Silicone 15cm Wire : Toys & Games.
Looking forward to seeing your new mower build!
Kenny: thanks for the reply. Yep. I ordered that kit this am
I will just swap the plug out on the cable. Thanks again for all your input. Doug
I think we all have at least one of those kits on hand!
Here are some 20cm GH style pre-made harnesses:
https://www.amazon.com/gp/product/B07PLPT2Z6
And if you ever need the older style DF connectors, here’s a link to those, also:
https://www.amazon.com/gp/product/B07S18D3RN
Between a copy or two of each of these and a little patience, I’ve been successful at connecting any peripheral hardware I’ve ever tried.
1 Like
I have that DF13 one, too.
Thanks for the reply. I just love the way manufacturers change things like the standards for wiring from one model to the next.
“The nice thing about STANDARDS is the are so many to choose from”
Doug
1 Like
Well, the GH connector really is a better one. At least they haven’t changed the pinouts.
But wait till you discover the mislabeling of the SimpleRTK2B UART2 pins…
(spoiler, TX2 and RX2 are reversed)
1 Like
Kenny, do you have a diagram or description of the jumper needed for the co99-f9p boards. I have two of these I plan to use on my 50" cub cadet.
I’ve been using it for 3yrs on 5 acres. with a flysky i6 ,works well but my 67 yr old hands aren’t too steady.
All though I worked on aircraft autopilots. the learning curve for the new acronym’s has been hard! Maybe just old age.
I really appreciate Your and Yuri’s work on these builds. I was wondering if feedback from wheel speed wouldn’t help to eliminate the need for rapid updates to the a/p from gps. because the hyd motors will never run evenly on uneven ground and might help with coordinated turns. No criticism just curious.
Thanks to you both, pls keep up the good work.
1 Like
I got my GHkit and had to make a all new cable as the contacts on the GH are different from the DF on the old one. Now I am faced with the Telemetry radio I previously used has the same issues. Cables are not compatible with CubeOrange. What telemetry setup are you using with Orange? I cant find the cheap Holybro that was used a couple years ago with GH cables. I can find the RFD900x only
On my mower, I use the Holybro 915MHz radio set that appears to be out of stock everywhere. It has never let me down.
I use this one from Amazon on my Copter, but it appears to have skyrocketed in price, and the build quality is not the same as the Holybro ones.
I recently found this mRo version that I think I’d trust a little more than the one I linked above on Amazon. mRo makes pretty high quality components.
Regardless of source, you may have to do some soldering or terminal crimping to get the connector style you need. While many of these companies endeavor to make things plug and play, there isn’t always a one-size-fits-all solution.
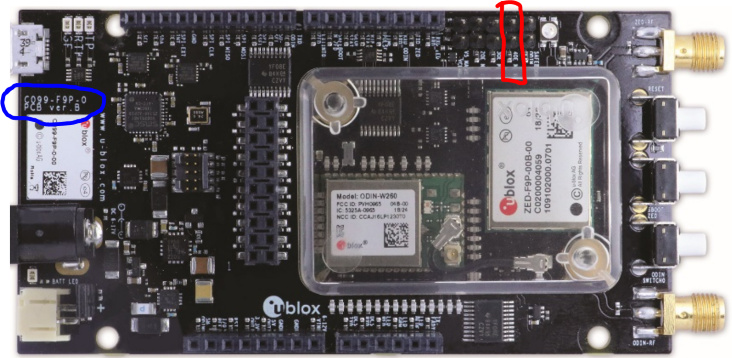
Rustey, I assume you are not planning to use the built-in WiFi communication on the boards. If you are, there are a few more complex changes you have to make. If you are not using that, you only need to install a jumper in the 40E position (circled in red below), assuming you have the same version of the PCB as I do. I think they may have revised it and I am not sure if anything related to jumpers changed. I have had my board since they were first introduced. Putting a jumper on 40E (and NO jumpers on 10E, 20E and 30E) disconnects the F9P UART1 RX line from the ODIN WiFi module and connects it to the Arduino D connector.
To connect to the a Pixhawk 2.1 (Cube), connect RXD-ZED to GPS1 pin 2 and TXD-ZED to GPS1 pin 3. I’m using an Screw Terminal shield. You can see the white and blue wires from what is labeled as D0 and D1 on the shield to the the GPS1 connector on the Cube. (D0 connects to RXD-ZED and D1 to TXD-ZED no the C099-F9P.)

I’m not sure if you are planning to have both GPSes on the mower so you can have a Moving Base configuration or just what. I’ll be glad to help anyway I can with those connections if you wish. I am running 2 C099-F9P boards on my mower (you can see a bit of the 2nd one at the lower left of the pic above.)
Looking forward to hearing more about your project!