Hello! I am a long time creeper and first time poster to the forums, so please educate me on any best posting practices where I am lacking. I am an APM noob and willing student.
I crashed my drone Buster running a Navio2 and APM 3.5.2 with a X frame, and it snapped the back left arm. It has since been replaced with a 3D printed replica, but now I’m getting some counterclockwise yawing. The replacement arm does seem to be flexible relative to the original carbon fiber arms, and I am hypothesizing that this may be the reason for my yawing. Unfortunately, the arms aren’t symmetrical so i can’t just move the arms and see if the yawing reverses. I did recalibrate the IMUs and Mags just to cancel out some variables, but seem to not notice a difference. I thought I’d peer through some logs with the counterclockwise yawing to see if the problem could be anything else, but I am yet a novice at pulling meaningful information from the logs. I was wondering if I could borrow some willing eyes to look at the logs? I was flying in STABILIZE mode during this logging. 00000067.BIN (977.2 KB)
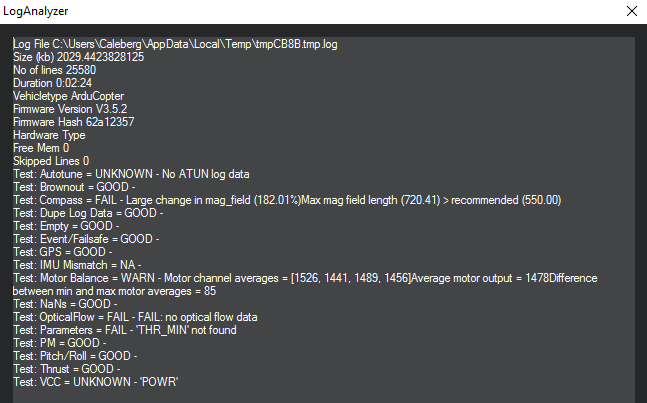
I am seeing that the actual yaw is leading the desired yaw, and I had an EKF_CHECK ECode 2 error message right after arming and throttling. Also, it seems weird that I am getting MAG errors when they appear in good health while inside plugged into mission planner.
I greatly appreciate any input! (Both in my yawing situation and in carving out proper Ardupilot forum etiquette).
Hi @lucamax , thanks for your reply.
I have re-calibrated many times via missionplanner and qgroundcontrol, wondering if the indoor environment in which I am calibrating is inaccurate. The heading of the copter in the missionplanner UI does appear to be quite stable when not flying. Is the compass reading/EKF used in STABILIZE mode? I tried setting COMPASS_USE and COMPASS_USE2 parameters to 0 via dronekit and still experienced the yawing behavior.
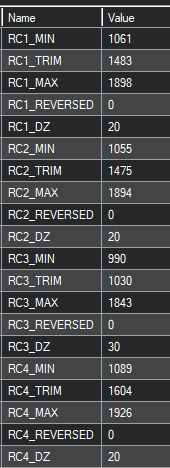
Recalibrate your RC in Mission Planner. The RC4 channel (Yaw) is trimmed at 1604, but your transmitter is sending 1504 at center stick, so you’re inadvertently commanding a left yaw.
The other RC channels are a bit inconsistent as well:
Calibrating indoor is never a good idea.
You should stay away from any magnetic source or iron structure.
At 1,5 meters from a shed with 12 cm H girders, I got 6° heading variation.
Wow that does seem to be a huge problem, I bet that is the main issue! I will fix those tomorrow and try to fly again. If it is the problem, I will certainly feel silly in retrospect for not checking the RC parameters/values post calibration… but now I know
@lucamax Dang that’s crazy, I never would have guessed that that would have such a huge impact on calibration! I’m definitely going to recalibrate outside tomorrow and will try to fly again. Thanks for the insight