Just hovered my newly converted Convergence in my backyard…only issue is a +/- 30 deg heading yo-yo back and forth…any ideas what is causing that?
I am using the same compass/gps location and type as Greg Covey’s build, BN220…no slop in tilt mechanics…tilt trimmed to 90deg/0deg with servo min/max when in QSTABLIZE/MANUAL and no yaw input…same pids as posted in reference build
yaw control works fine…just slowly oscillates back and forth 30deg at neutral
I tried tuning and it( greatly increasing Pids)
improved it considerably, but I still cannot completely eliminate the wag…
here is the log file of the last flight with optimized YAW rate PID…
I am not experienced with debugging via the data log, so if anyone can help I would appreciate it…
Thanks, Increased to 10 (the maximum valid value on latest firmware), also doubled my I/P on yaw again…now it holds pretty well…good enough to fly…have tested LOITER and its working well…
winds are 15-20mph here until late in the week, so I have to wait until then to try transitioning…I expect it to be uneventful, however…
The 1-10Hz recommended range for the yaw filter is for multicopters, but vehicles with thrust vectoring can have much faster yaw response than a multicopter. You can use larger values if you want. But I don’t remember how I arrived at 15Hz when I was tuning.
Hi Mark.
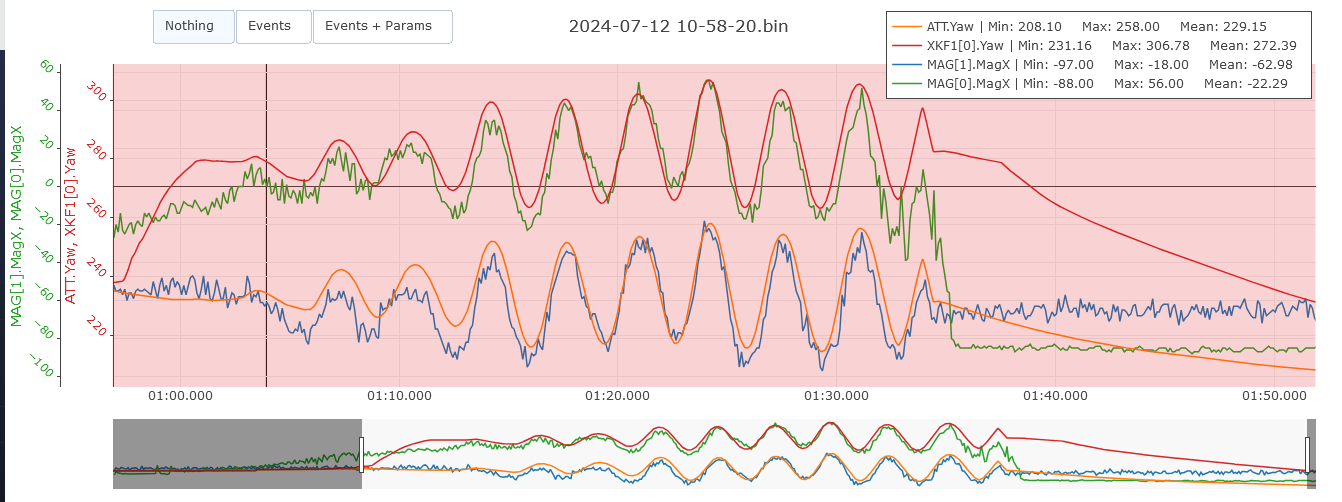
I have the same problem with my Titan Avenger. Q_A_RAT_YAW_FLTT is set at 15. Changed PID but no change. Below is a link to the bin file. Your help would be appreciated. 2024-07-12 10-58-20.bin
you have not followed the Quadplane tuning guide in the wiki…(I can tell since no noise filtering has been setup and you have no yaw FF)…you should follow the all the appropriate steps here: QuadPlane VTOL Tuning — Plane documentation
if you tried the VTOL QuickTune script, you either did not follow the readme or used an old version…Q_A_RAT_YAW_FLTE should be 0 (its 2HZ, this is one of the reasons it oscillates at low hz in yaw…also, since you have not set yaw FF term per the tuning instructions… FF is the primary term for vectored yaw pid loops)