I just install version 3.5-rc9 and will do autotune. Autotune was started in PosHold mode and started normal. After 3-4 roll the drone turn 2 time 90 deg. left. Autotune was then aborted.
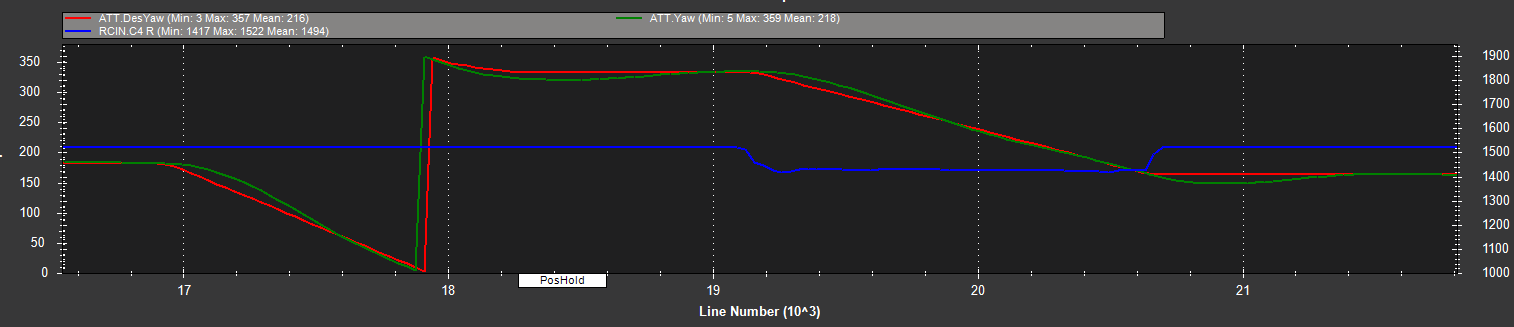
The turn is at time 1700 and I turn this back time 1910 and landed.
Why this 2 time tune left ??
“In order to twitch perpendicular to the wind direction, the vehicle may suddenly rotate in either direction up to 90 degrees as it drifts 5m (or more) from the target location.”