great answer. Good to know that some esc’s don’t work even if they are the exact same model (different target? you confirmed?).
Why do you say there’s no performance difference for larger crafts? dshot specifically or bidirectionnal?
I understand the big props won’t change speed fast compared to smaller ones, so that little extra precision on speed is negligeable. Is that your reason?
I have some that are C-H-25 and they don’t work with the same level firmware, 16.73 I think, as others
have reported working with that same timing.
Yes, right. I have tried PWM, Dhsot150 and Dhotr300 on a 13" (and 14") quad and couldn’t tell the difference. I suppose others might challenge that or say there is an efficiency boost and I wouldn’t argue the point.
that’s wierd. You used that?
I was going from memory but I found my post in the bidirectional Dhsot thread and it’s C-H-15 and I tried with 16.73 and a few others. No go for mine but another poster said it worked for him. There is also a problem with the ESC’s built into the iFlight H7 with Ardupilot. Those BLHeli_S ESC’s don’t work either. At least not yet. You can see the note in the hwdef file for this board.
I see no advantage to using BlHeli ESCs in anything other than FPV racers, cine whoops, and similar aircraft with high Kv motors swinging props smaller that 6 or 7 inches.
There is a lot of hype about using BlHeli with larger aircraft, but IMNSHO, these hypsters have no clue about the physics involved.
Think about the power train differences between an 18 wheel tractor trailer and a Porsche 911, or the differences between a MotoGP racing bike and a Honda Goldwing touring bike.
Other than fuel type/grade, the major differences are the engine rotational speeds and torque.
The same physics that apply to wheeled vehicles also apply to winged and rotary winged aircraft.
BlHeli was developed for racing where the aircraft with the fastest throttle and control input response wins.
On the other hand, larger aircraft with lower Kv motors and larger props don’t get the same benefit because of prop and motor inertia. Trying to change the motor speed too quickly causes the motor to actually stall aka desync. In some if not all ESCs, desync can cause the effected ESC(s) to reboot and in this situation the aircraft go straight to the scene of the crash.
As for telemetry, with the exception of temperatures (which you don’t really need if your power system is properly designed), and motor/prop rpm (again unnecessary) a Pixhawk with a power module, a Yaapu or Craft&Theory data converter and some LUA scripts will give you every piece of telemetry data that you need.
This same data can be transmitted via telemetry radio to a laptop running Mission Planner, APM Planner, or qGround Control.
The additional cost and proprietary nature of a BLHeli32 ESC are not good selling points.
Screen shot of Yaapu Telemetry widget running on a Jumper T16 with OpenTX 2.3.11

Screen shot of Google Maps in Yaapu Telemetry widget:

thank you for the infos! I will definitely consider for the big octo coming up. Have you ever experienced desync with big birds and blheli?
No, because I am smart enough not to use BlHeli on ‘big birds’.
I haven’t. All my craft have either BLHeli_S (2) or BLHeli_32 (all the others) in all sizes. I have helped out on some larger craft where they have worked really well. One large Octoquad comes to mind built to carry some expensive gear. The tune on that craft and it’s flight characteristics were great. ESC RPM used for the Dynamic Notch in that case. We are not talking scary development code here this is in Stable.
But of course there is always the exception. One recent case comes to mind where the pilot didn’t read the Wiki and he had configured Dshot1200. Crashola.
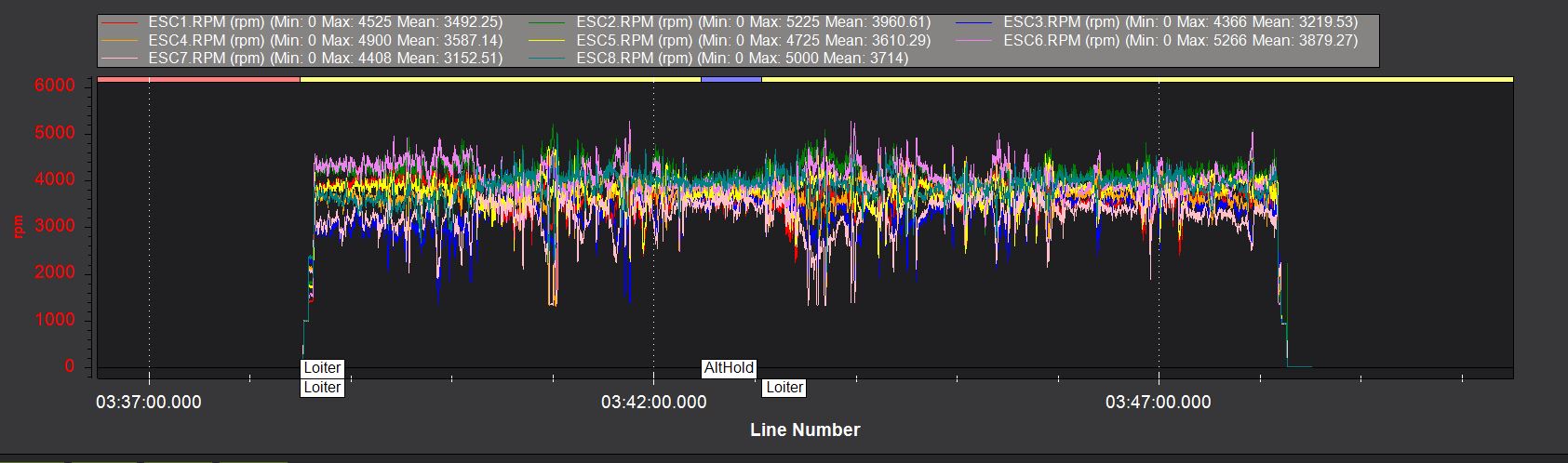
I would add that RPM log data can be helpful for tuning and troubleshooting also. RC Out data is commanded, RPM is actual. Octoquad ![]()
1 Like
Why are there such huge differences in average RPM? 3152 to 3879 is more 20% more. Is it flat Okto or coaxial? On a coaxial octo I would expect that 5,6,7 and 8 have higher RPM but on your octo it is different.
On my quad I have around 7% difference between highest and lowest mean RC out.
Motor orientation (arm twist) ? Weight distribuition? is the CG in the center?
Octoquad as I said. It’s not hovering in most of that flight. It wasn’t posted for analysis simply to show the usefulness of ESC telemetry. I didn’t pay much attention to what stage of tuning that log came from.
I second BLheli32 on builds of all sizes yielding excellent results. Once I started using ESC RPM for the dynamic notch, I never went back 
That’s what I think also, but OldGazer’s argument seems valid. I will try some blheli’s since I have them on hand.
Is there such a thing as a motor not spinning protection with bidirectional dshot? If so, it would be an interesting option.
Certainly a question better answered by @andyp1per
I can guess that without FOC or VOC the fc only knows the guessed RPM sent from the ESC, not if the motor is actually spinning or not.