I am still tuning my yaw.
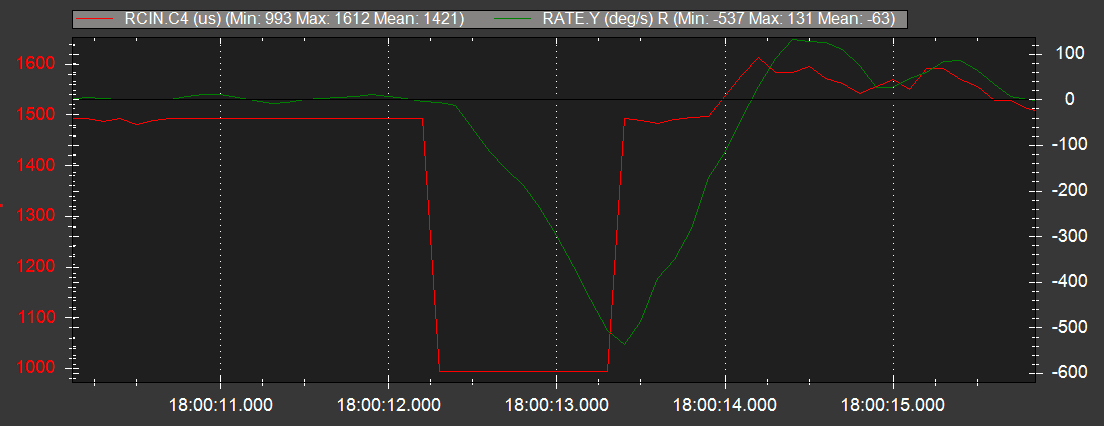
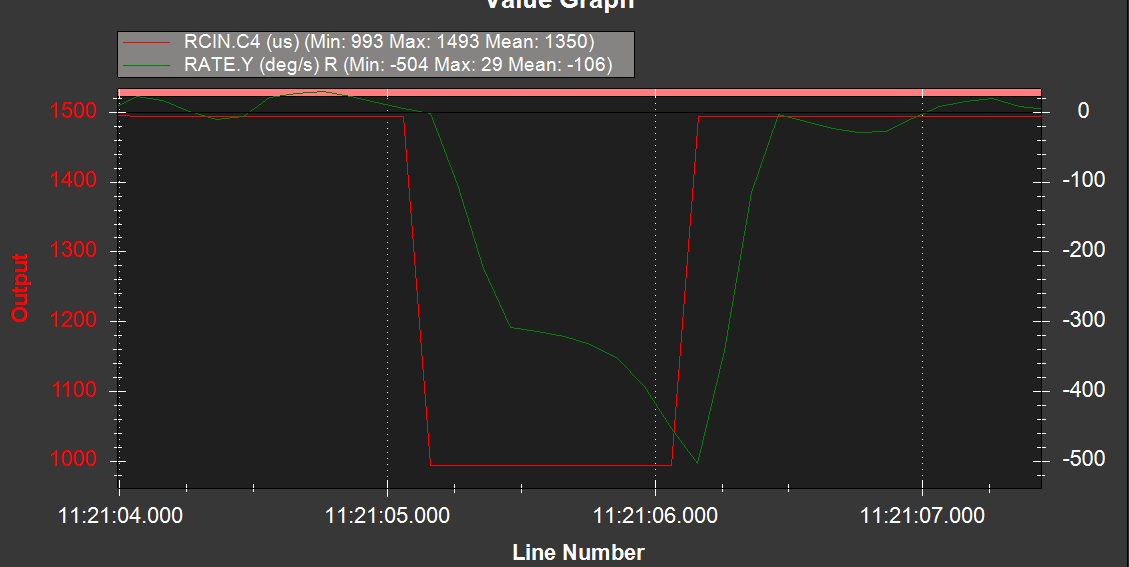
I programmed my transmitter so that it sends full left rudder for 1 sec by flipping a switch.
The log shows a big overshoot in yaw.
From the moment the rudder input stops it takes nearly a second until yaw rate is zero.
If I fly one my helis with a normal fbl system (vstabi, microbeast), rotation stops immediatly if I release the rudder.
To reduce the overshoot, you could increase the D term a little bit and check again the overall response. To make it turn sharper, you could increase the P term, but physics has its limits. The drone has some inertia and it can’t start and stop immediately.