Hello all, I am facing issue with yaw without any commands. I have a quadcopter with tmotor 230kv motor , 40amps hobbywing esc, 24inch foldable prop, 33600mah battery connected in parallel and Cuav x7+ FC. The copter is yawing while takeoff and landing without any commands. As I did accel and compass calibration many times but still the issue is not getting solved. I did autotuned the drone for 3 times still issue is not yet resolved. I am attaching a log below please have a look and suggest me what best can be done.’
Thanks in advance.
Calibrate drone once by keeping level flat by using level guage this might solve your problem!! And damping of rubber or replace them if all ready using.
Did calibration by keeping on level surface but still the issue exits.
These messages:
EKF3 IMU0 MAG0 in-flight yaw alignment complete
are informational, not an error. This indicates EKF has worked out all the differences between the compass, IMU and GPS track and settled on a heading.
There’s other things to worry about.
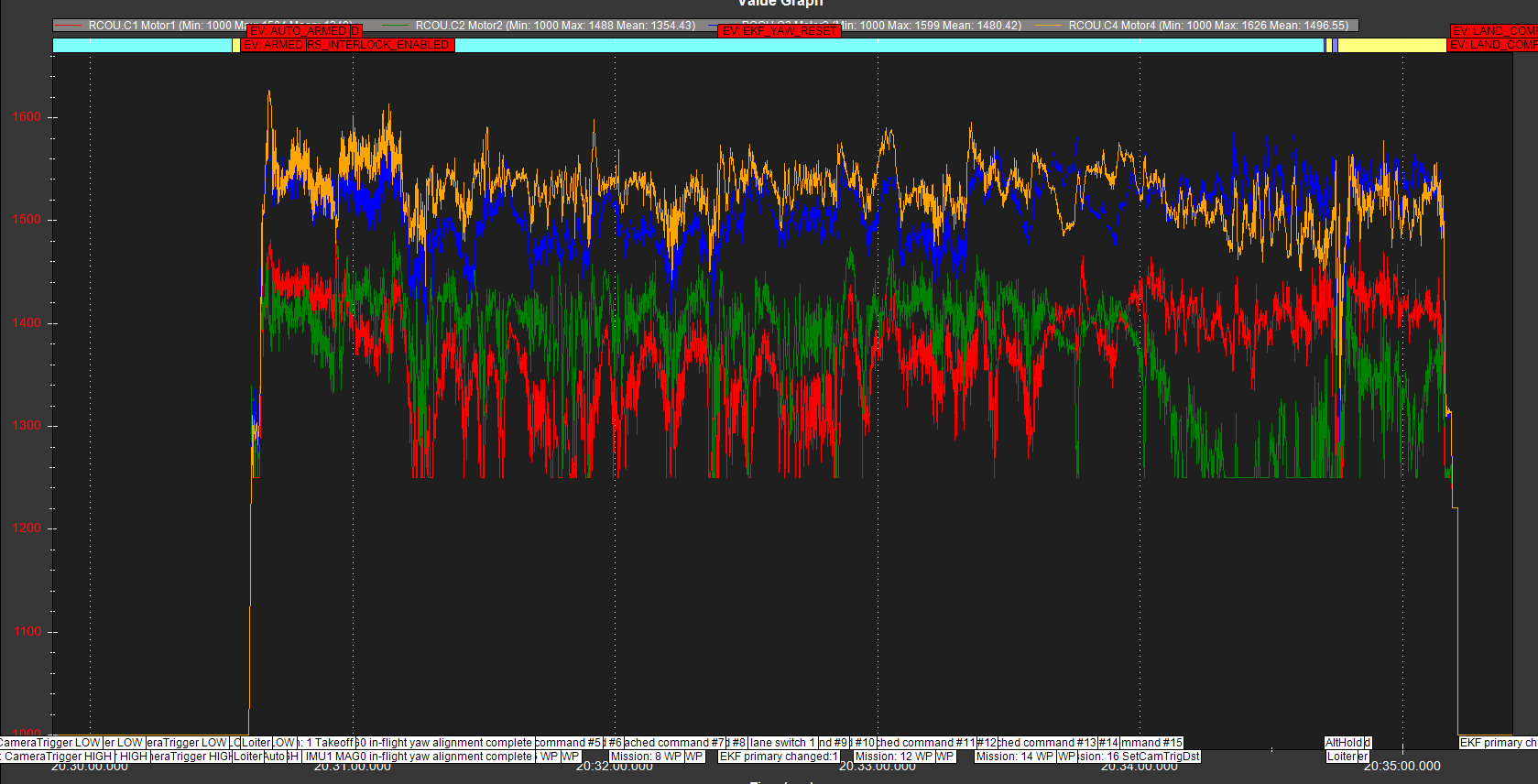
Motor outputs are very different indicating a physical yaw bias. You can see motors 1 and 2 are even hitting minimum. This will be making attitude control very poor compared to what it could be.
Look for twisted motor mounts or frame.
It also means there’s a lot of extra noise peaks to deal with:

Are you really certain you motors wont spin at lower settings than these?
MOT_SPIN_ARM,0.22
MOT_SPIN_MIN,0.25
That’s very high and I suspect you need to do an ESC calibrations and recheck those values before going further.
https://ardupilot.org/copter/docs/esc-calibration.html#semi-automatic-esc-by-esc-calibration
When you’ve got the physical issues sorted out and rechecked those MOT_SPIN values do an ordinary RC-controlled flight in AltHold and Loiter - do plenty of circles, yaw, ascents and descents.
1 Like
Esc calibration done by two methods one using transmitter and semi esc calibration through parameter. Even after calibration the esc, motor spin I am getting is 0.22 and it’s not even going below.
That’s very strange, I would consider changing those ESCs for something else, like a 4in1 BLHELI32 or AM32, being sure NOT to get some cheap copy.
The old Hobbywing 40A ESCs were the reliable one everyone had, and I’ve never seen MOT_SPIN values up that high myself.
Are they “Xrotor” or “Skywalker” ? Because there is a difference.
They are the hobby wing Xrotor 40amps Escs.