Weird crashed caused by a IMU error lane switch or gps error. Not sure which. No warning at all and after a lot of flights with this drone it doesnt make sense. Not sure what happened. Is this a bug in the firmware?
Access requirement on that log, can you open it up?
Sorry. Updated now unrestricted
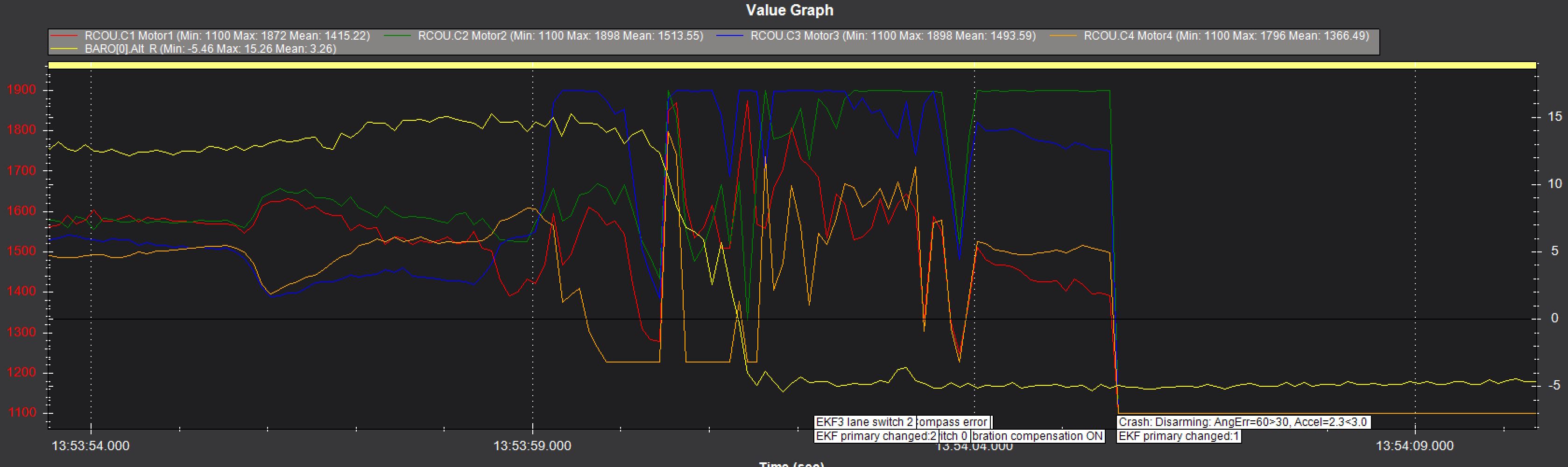
Doubt that. Initial thrust loss on Motor 3, Motor 4 drops as expected and it’s heading for the ground. Everything else you saw was after the fact.
You have some odd Rate Pitch/Roll P&I values there. Not much to see of the tune before things went bad but I wouldn’t expect that to work well.
Bug? No…
Thats interesting. I never even thought of that. I cant see on the graph how that makes sense. Did it shut off then come back on again?
1 Like
It does appear so. But by that time the instability was severe.
The RCouts can tell you a lot about what a multirotor is doing not just crash analysis.
whats wrong with my pitch and roll Values. They have been that way for a long time.
You really should go somewhere more remote for your flights ![]() Just kidding!
Just kidding!
It’s a bit like a mechanical fault - such as prop coming off or breaking, or an arm or motor mount coming loose.
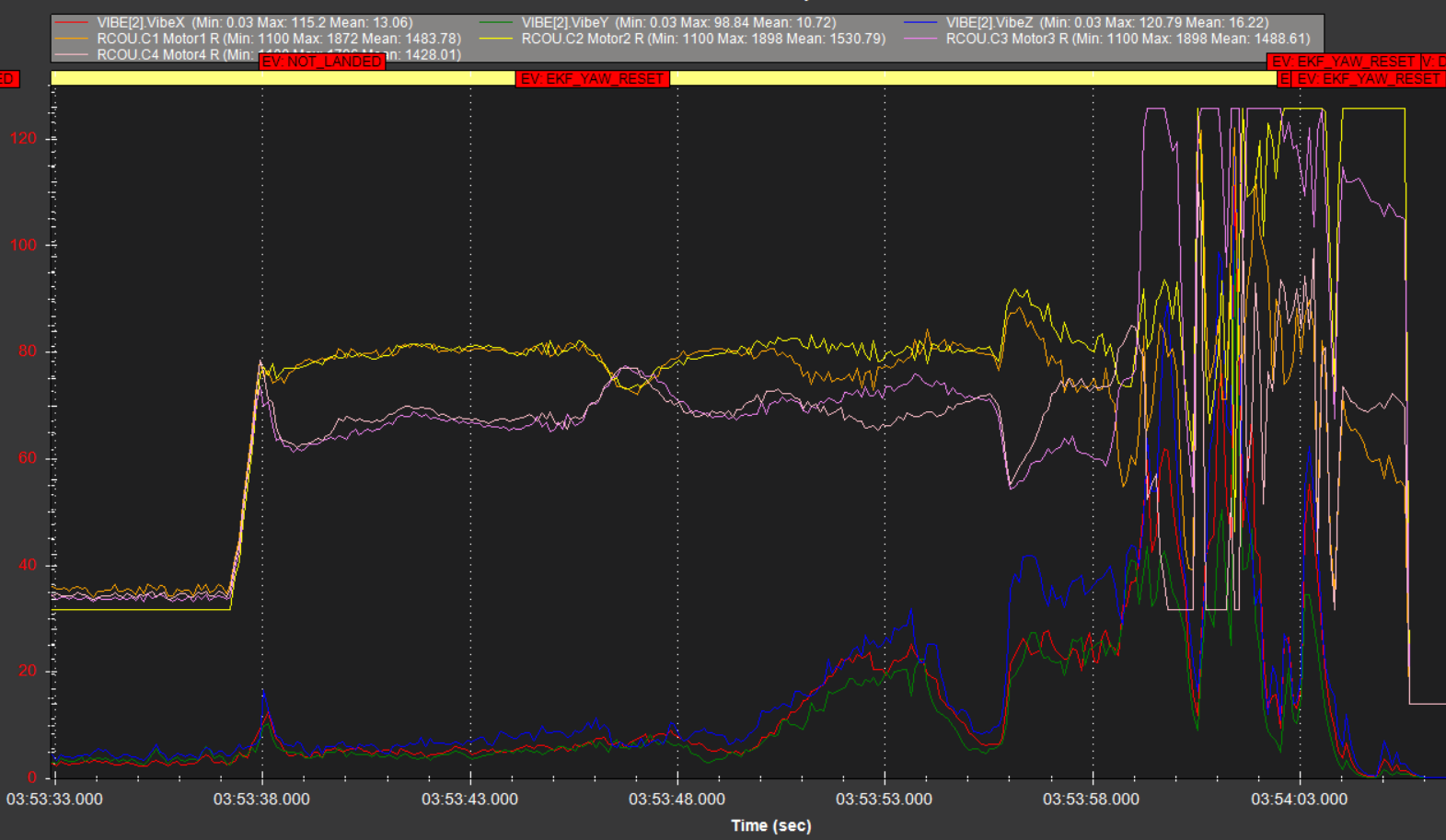
Vibrations increase during flight, especially the non-damped IMU.
At the peak of altitude Motor 3 is commanded to maximum when the breakage happens.
Attitude control is lost and soon the copter comes down.
You can see in this graph how vibrations increase in stages and right at the breakage point 03:53:59 the vibrations increase even further.
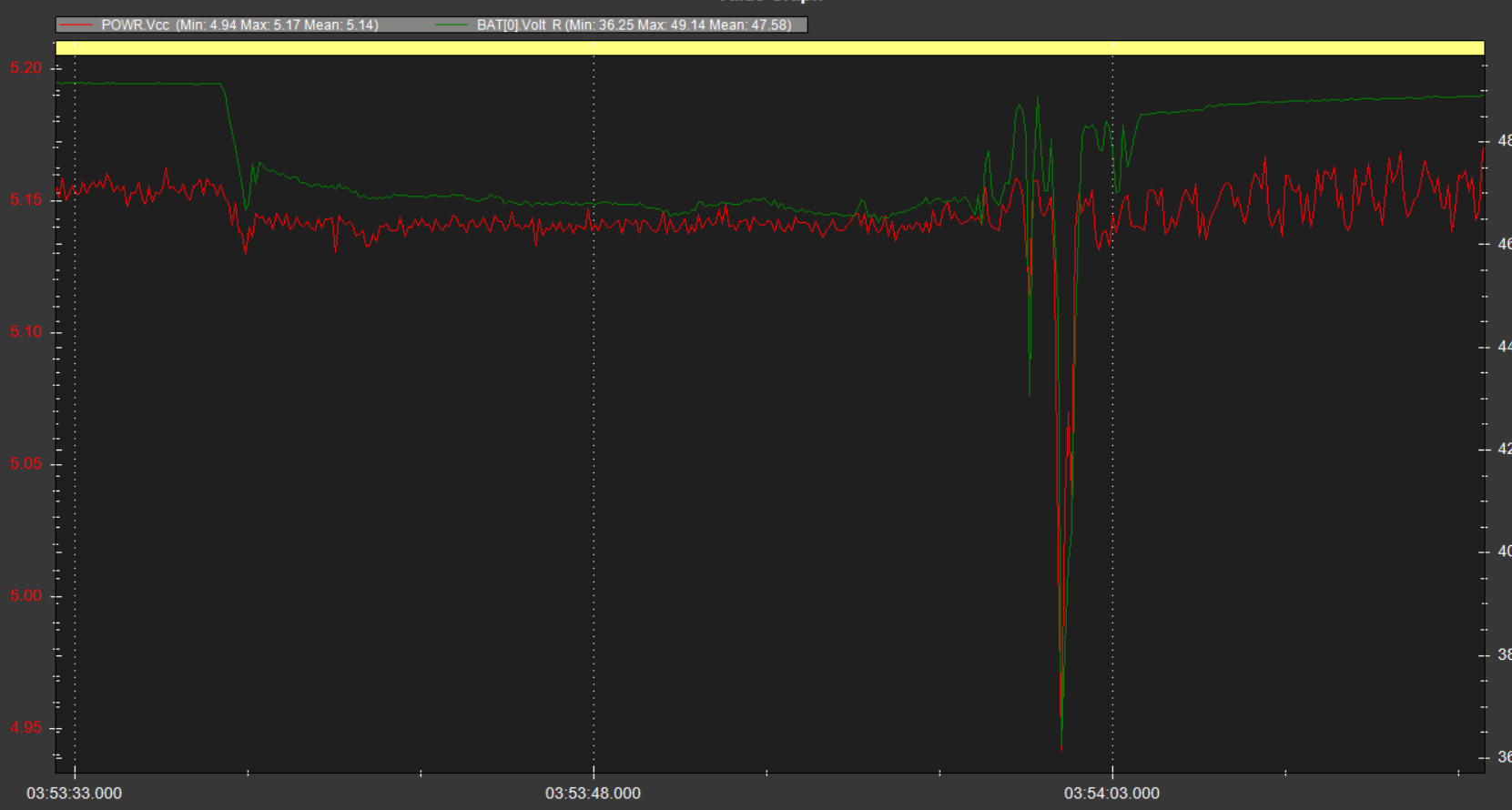
The battery voltage took a hit during the incident and it also affected the +5v supply for the flight controller, as if there was a short circuit somewhere. This only happened after the copter was already going down, possibly when it hit the ground. So this wasnt the cause, just putting this in so you are aware.
The IMU switches, yaw resets, and GPS Glitches all come later, on the way down or after impact - this is to be expected.
Before the flight
Number of Sats decrease and HDOP increases immediately when you arm so there could be an interference problem.
Also set these and check the other Fence parameters, set a suitable altitude and radius.
FENCE_ENABLE,1
GPS_GNSS_MODE,67
These will improve the GNSS update rate, and force you to wait for a good GPS 3D Fix and Home position before allowing arming. You can just leave the copter in Loiter and wait till it is armable (essentially the same as FENCE_ENABLE,1) but this takes the human error out of the equation.
Post a log of a normal flight before the crash. Before the thrust loss it wasn’t looking good to me.
Can’t count how many time people have said “it was flying great” and it was a crash waiting to happen. Not suggesting it’s the cause of your crash.
Ok. I will post it when I get the drone back to the shop.