Just getting back into this project. I’ve got several questions to help optimize this craft for mapping- so I’ll lay them out in a couple posts here.
When I last flew the K1 on Arduplane in October, 2021; there was yaw available from the rudder stick.
Now (May 3rd 2022) firmware the rudder stick does nothing.
What parameters would be used to re-enable yaw control on the tailsitter?
Also- I believe I read somewhere that yaw for VTOL was not functional in SITL. Is this still the case? I’m testing via flightaxis and Realflight 9.5, and currently not seeing any yaw (as with the real vehicle).
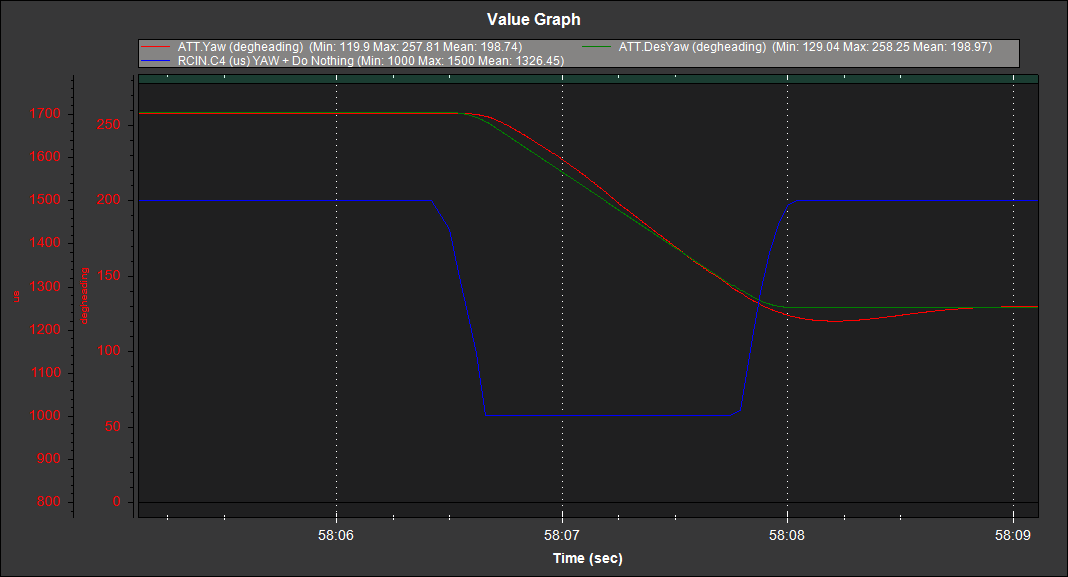
For those following along, adjusting RUDD_DT_GAIN to 100 along with the default Q_YAW_RATE_MAX setting of 100 deg/s will result in a spin with full rudder stick!
One of the reason that I’m interested in the H-Wing concept for mapping is to be efficient with limitations of cameras, GNSS, and batteries. For me, this means flying relatively slowly; and sticking directly to the planned transects- with little wasted flight path or unusable images.
I’ve seen videos of quadmotor tailsitters operating at slow speed/high alpha conditions. I’d like to apply this concept, along with substantial yaw (rather than bank) in turns.
Below is an example of the best that I’ve been able to achieve with the K1. Between waypoints 4 and 7 I’d consider a pretty serviceable turn. Between waypoints 14 and 17 is probably more typical of a best case of what I’ve seen in the field with this airframe. In wind, the turns are even more pronounced.
So the question is, what can we do to tune the vehicle to function more like a quadrotor and less like an airplane in sharp turns? I assume this is related to Q_ASSIST, but would really appreciate some pointers on how to implement it.
I was wondering if you could share your current .param file? I am unhappy with the current performance of this aircraft using the Yaw to control the roll in FBW.
Thanks and great working on the tuning.
Here you go. Be aware, as mentioned above, that it is possible to enter an uncontrolled spin when using too much yaw. This applies in FBWA and also Auto (confirmed in SITL). 2022-06-01-K1-APM.param (20.2 KB)
I really wish someone more skilled than me could weigh in on making the K1 more functional as a mapping platform.
Thanks.
I noticed that when I was flying and turning into the mine, it would sometimes start to get unstable. Its like it was trying to maintain airspeed and throttled way back. I was hoping that your param would allow it to main train control at lower airspeeds.
@RSUAS were you able to flash the FC via Mission Planner with a .apj file? When I try, Mission Planner keeps losing communication with the board before it can flash. I’m not sure how to put this board into DFU mode to flash that way.
I believe the first board I tried had a similar result to you- and I ended up successfully flashing the .apj with QGroundControl. The second board was through Mission Planner with no issues. Either way, I never had to screw around with DFU mode.