Hello,
My plane is a Vtol with three engines. Two tilting at the front and one fixed at the rear.
I’m at step 6 of the setup, and my problem is this:
In stable hovering, QSTABILIZE takes 1-2 seconds for my radio request to rotate around the yaw
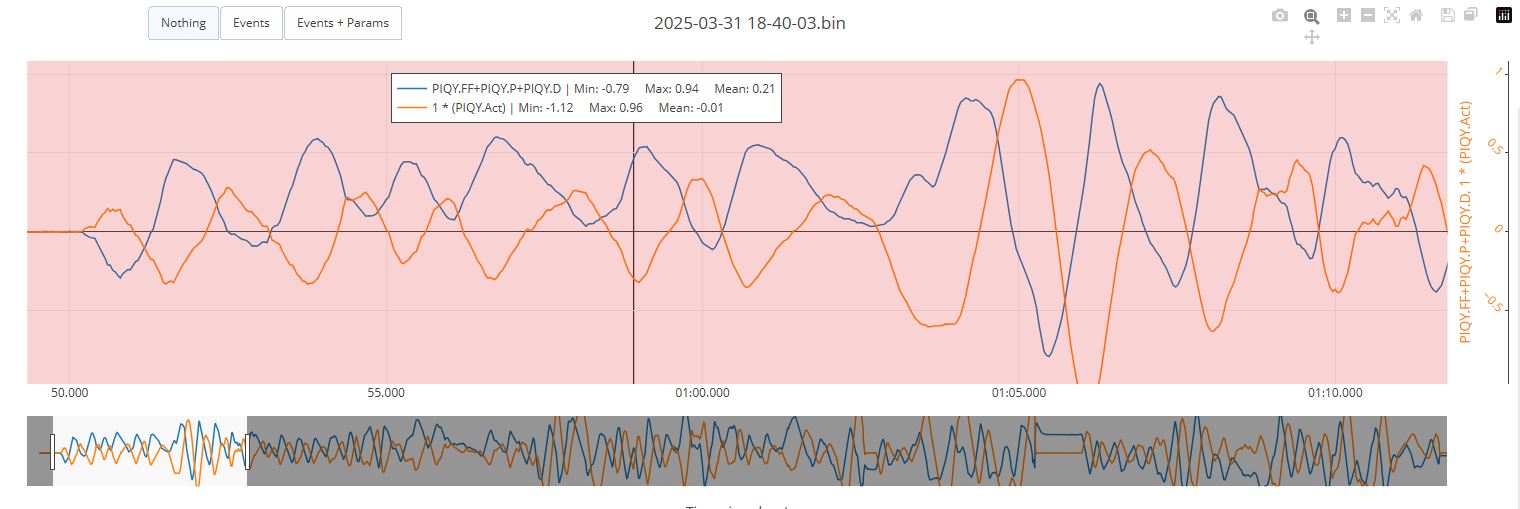
Following the yaw adjustment recommendations and my logs, I have X = 1 for this equation with curves of similar amplitude.
PIQY.FF + PIQY.P + PIQY.D
X * (PIQY.Act)
so Q_A_RAT_YAW_FF = Q_A_RAT_YAW_I = 1.
I should point out that I’m at mid-engine stroke (I have some reserve).
the inclination of the motors obviously goes beyond 90°.
What are the settings I need to change?
I have the same issue with delayed yaw response on my quad tilt rotor plane. I’m not sure if it’s just a restriction of the servo speed or if it can be improved at all. It’s not so bad as to make the plane unflyable.
I’m wondering if it might be because of the lacer angle of the Vtoll motors, as I only have a few degrees and the machine has a lot of inertia on the yaw because of its length.
what angle do you use to ride the yaw on your till quad?
Anyone here facing delayed response to throttle? motors are spinning up slower, eventually reaching desired RPM. My esc are calibrated. All hardware is from ZOHD - the vtol kit for altus