Been having an issue with a custom quadcopter build, with the yaw oscillating in particular. The quadcopter is a large build made of square aluminum tubes in an “I” configuration but the engines are placed 2m apart from each other, square. I’m using T-Motor U13Ⅱ KV130, T-Motor FLAME 180A HV ESC and 26x12in, motor,esc,prop combination and a 14s lipo battery.
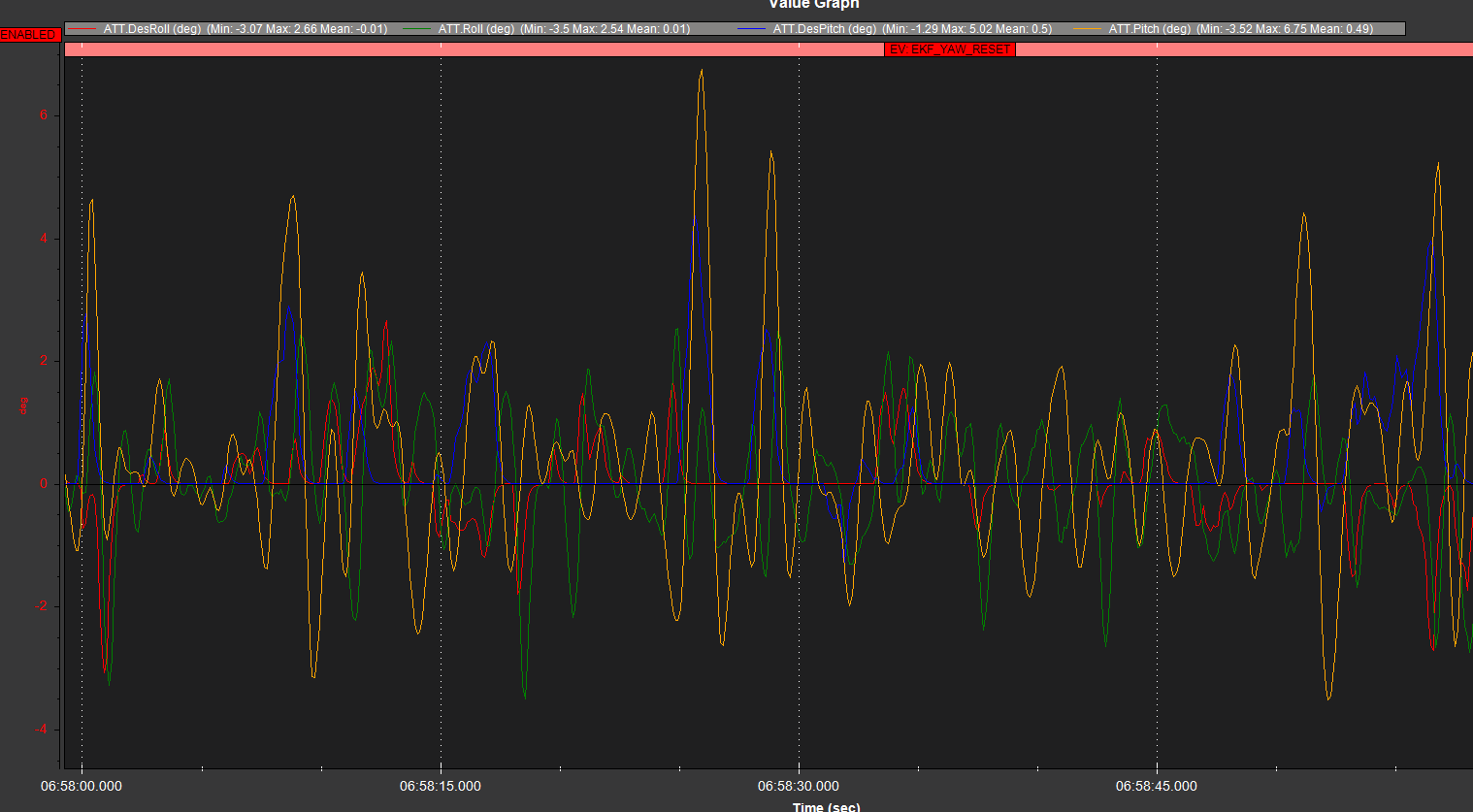
This a reading from my logs showing desired and current yaw which is very unstable:
I have tried autotune before but it never finished, I read the messages tab on mission planner and it keeps trying the first process of tuning. I used the initial parameter plugin on mission planner and then after lowering the value for ATC_ANG_YAW_P from 4.5 to 3 and increasing ATC_RAT_YAW_FLTT from 10 to 30 the quadcopter takes off much more stable but tends to yaw when I increase or decrease throttle.
There is definitely some frame-twist or motor mount issues, with motors 3 and 4 having to work harder to counteract some physical yaw bias with motors 1 and 2.
Set up the Harmonic Notch filter too, these should be a good starting point:
INS_LOG_BAT_MASK,7
INS_LOG_BAT_OPT,0
INS_HNTCH_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.16
INS_HNTCH_FREQ,80
INS_HNTCH_BW,40
INS_HNTCH_ATT,40
You could also try a higher MOT_THST_EXPO of 0.4 to see if that improves stability.
You’ll have to run Autotune once you get these things sorted. Feel free to supply more .bin logs as you progress.
Thanks for the advice, I’ve started with the Harmonic Notch filter as you suggested and did a test flight. Attached is the link to the bin file: 2022-05-03 12-15-22.bin
@xfacta , I mounted gopros and did a flight to see any flexing, nothing of concern was noticed, just inital vibrations when taking off. By the time it was in the air, it was ok.