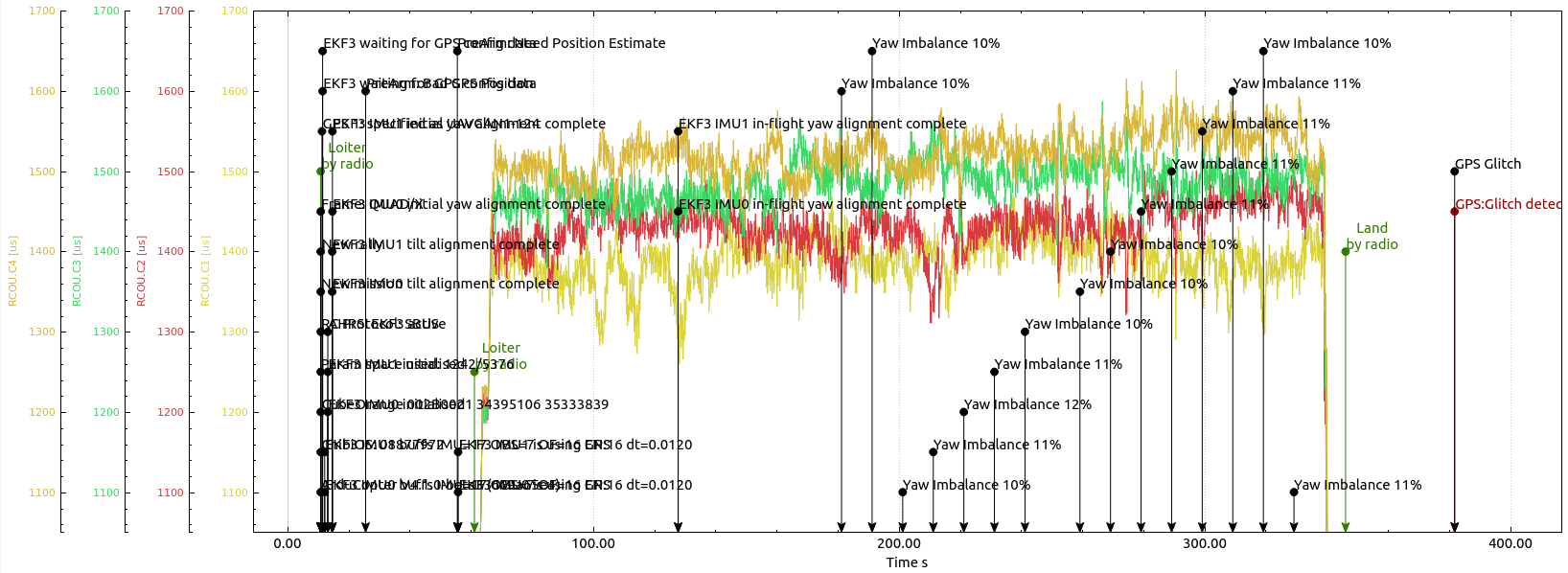
We were flying today the Arducopter 4.1 version and in one of the flights, we constantly got the message “Emergency: Yaw imbalance 10%” with the value changing to 11% and 12%. After reading the documentation, we figure it out that this means that the yaw action is getting saturated, and that the higher the imbalance the closer the vehicle gets to not having more control power for the yaw action. However, it seems to us that the warning was triggered a long way before reaching the threshold set in ATC_RAT_YAW_IMAX=0.5. Checking at the motors, it seems that the quadcopter still has control energy, since the difference between the motors PWM is not higher than 100us:
Thank you! we will definitely review the hardware. I gather the fact that it was a little bit windy contributed in some proportion to persistent yaw corrections, but we will keep an eye on out hardware.
I think having a motor imbalance of 100pwm is somewhat common. If you can get it less than that then that’s great but I think it won’t cause many problems.
As others have said, the messages should go away for most users once we release -beta4 which I hope will happen next week.