We had an experience today where the drone started its mission but was unable to maintain heading. When approaching one of the corners, the vehicle just spun. Could any of you with more experience have a look at the logs?
According to log, you are flying an Hexa X copter.
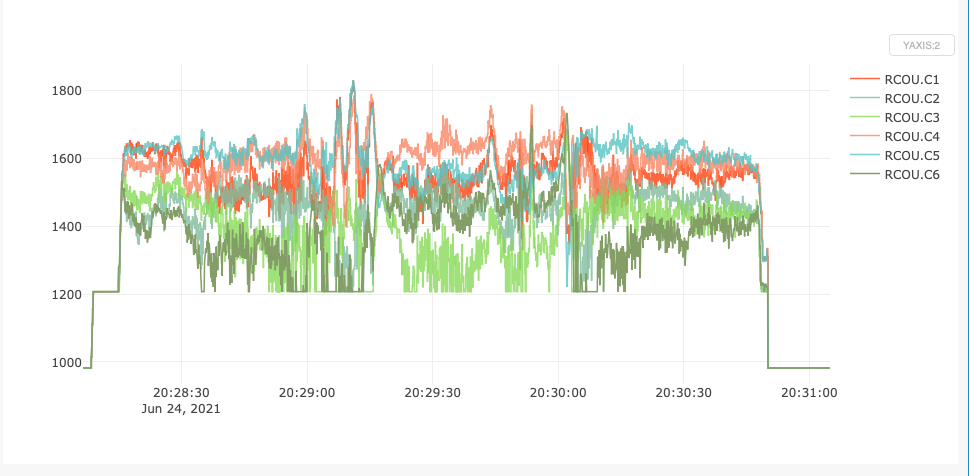
Looking at RC Out show a nose heavy (bad weight balance) or one or more motor is not in the same plane, as Motors 3, 2 and 6 are at low RPM most of the time.
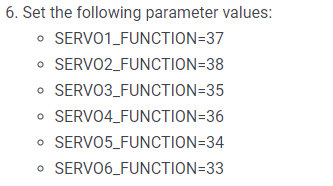
Hi @mlebret thanks for your input. I have to mention that this setup is using the Kore Carrier board. So for the Hex Setup it requires some specific configuration.
I’m too lazy to map your motors, but I can tell you that if there is a big prop platform happily running Flame ESCs around, it’s been hidden from my sight. Alphas are OK-ish, as long as it’s a supported motor and you fork out the extra $$$ for the programming interface.
BTW, is it a new build experiencing its first mission, or is it a 2-year old veteran that ran flawlessly since and this just happened ?
@ThePara Alphas are in backorder so we tried the Flames (funny name). The drone is flying Ok-ish in Loiter with manual control. But this was our first attempt to go AUTO. In AUTO we saw this weird behavior and I believe it has to do with PIDs.
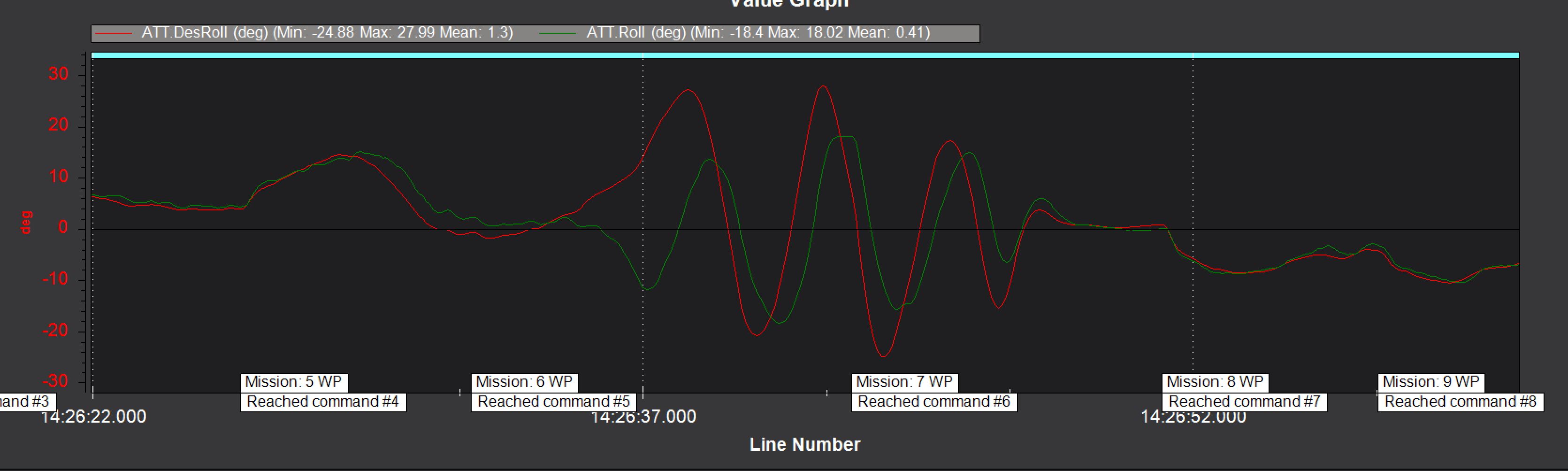
I would say PID’s also Look at the phase delay between Des Pitch/Roll and Pitch/roll. Yaw shows this also. One other thing of note is you have MOT_SPIN_ARM and MOT_SPIN_MIN se the same and quite high,
We kinda solve the problem by adding some weight to the aircraft. It looks like the problem happen because the drone was too light and 3 motors were not able to lower their PWM to perform the yaw correctly. Since this drone will be used for cargo, we will have no problem because it will be heavy.
We will also do some more test flights with lower values for MOT_SPIN_ARM and MOT_SPIN_MIN to check it out. For now it’s clear that these big boys need some payload to fly better.