Hello,
I am using a positioning system and trying to fake GPS input data. For that reason I configured (among others):
- EK3_SRC1_YAW = 2 (GPS)
- GPS_TYPE = 14 (Mavlink)
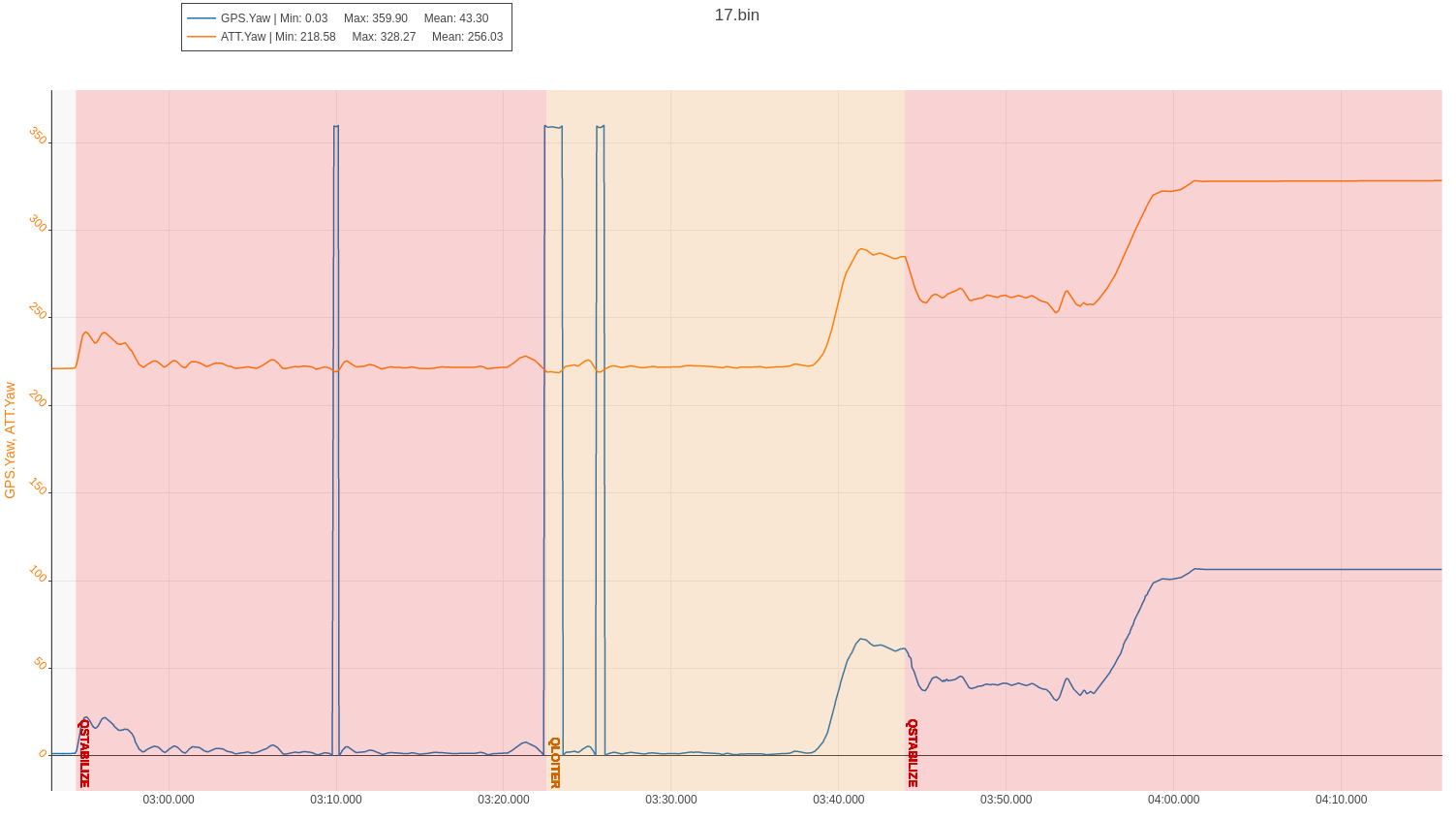
Below you can see that Yaw fed from the GPS and ATT.Yaw do not match. It seems that there is an offset.
- My first question is how to be sure that the EKF is using the GPS data? I think that now it is not used.
- Another consideration is that the compass-less yaw operation in Plane requires 2 GPSs and a certain configuration. Since I dont have this setup, only fake GPS input, is 1 “fake” GPS sufficient or should I make 2 fake GPS input etc etc…
Flight log: 17.bin - Google Drive
code snippet with Fake GPS feeding:
mavlink_msg_gps_input_pack(
system_id,
MAV_COMP_ID_PERIPHERAL,
&message,
timestamp_us,
0, // gps id
0,
0, // ms start of week
1, // week no
3, // 3d fix
int32_t(519943190 + pose.y/0.01113170996), // lat (deg E7)
int32_t(43729300 + pose.x/0.01113170996), // lon
0 - pose.z, // alt
1.0, // hdop
1.0, // vdop
pose_der.x,
pose_der.y,
pose_der.z,
0.001, // speed accuracy (m/s)
0.01, // horiz accuracy (m)
0.001, // vert accuracy (m)
15, // satellites
(uint16_t)(yaw0_360*100)); // yaw (degE2)