Hello,I built my plane (tricopter!) and decided to fly, but the plane was behaving strangely.
When taking off, I set the plane upwind. Immediately after takeoff, the wind begins to turn the aircraft in the direction of the wind, by 180 degrees. For a while the aircraft tries to align its position with the course, but then it begins to hold the current course DOWNWIND, even though the takeoff was to start UPwind.
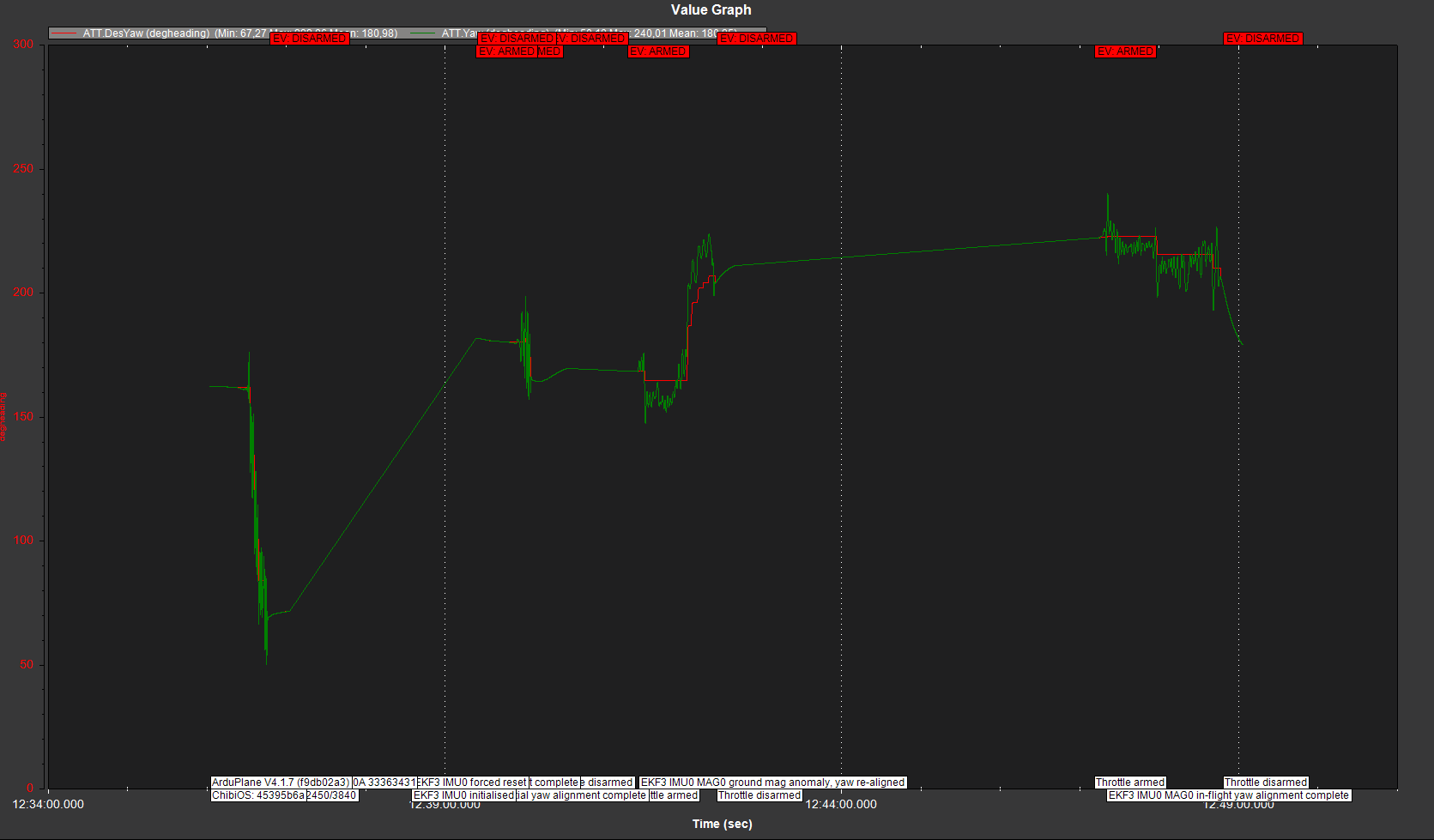
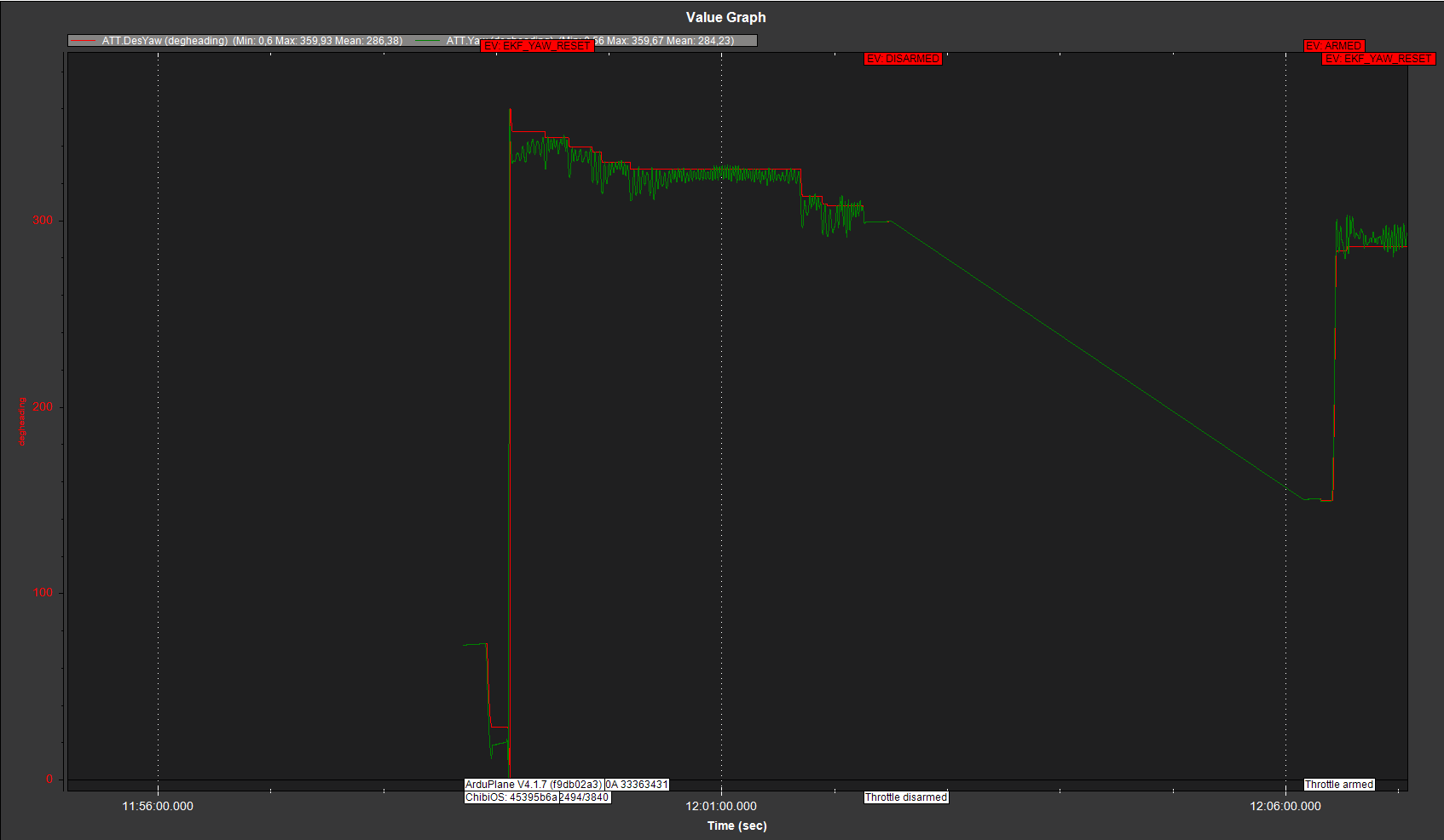
I decided to study the autopilot log and noticed a yaw reset event
At the beginning of takeoff, a servo that turns the plane on course. After the reset, the aircraft begins to hold the course to which it was turned after takeoff, that is, it is shifted by 180 degrees.
The fact is that because of the small space, I have to place the autopilot next to the power cable of one of the rear motors, so it has a lot of influence on takeoff. I compensate for this with gps. The EKF is configured to switch between internal compass and GPS. Therefore, I believe that I do not need to perform YAW RESET, since when switching to a fixed wing, the interference will disappear, thereby returning the correct values to the internal compass.
How I see the situation:
- Takeoff
- The internal compass is turned off using the EKF, GPS is used
- During this time, the plane tries to turn itself in the right direction
- The YAW RESET is triggered and the aircraft is fixed on the wrong course.
Some facts:
- During testing on a mockup, not a full-fledged aircraft, this event was not called.
- Due to the fact that this is a reverse tricopter, and the front motor is only one against two rear motors, in the loiter mode it began to be blown away by the wind and could not hold the point.
- I can see his turn in flight on telemetry, so switching from the internal compass to the GPS is correct and displays the correct heading, which does not require a reset.
- I fly at the training ground, so the correct course will be on the ground, and not after taking off to a height of 5m, as is done for quadrocopters
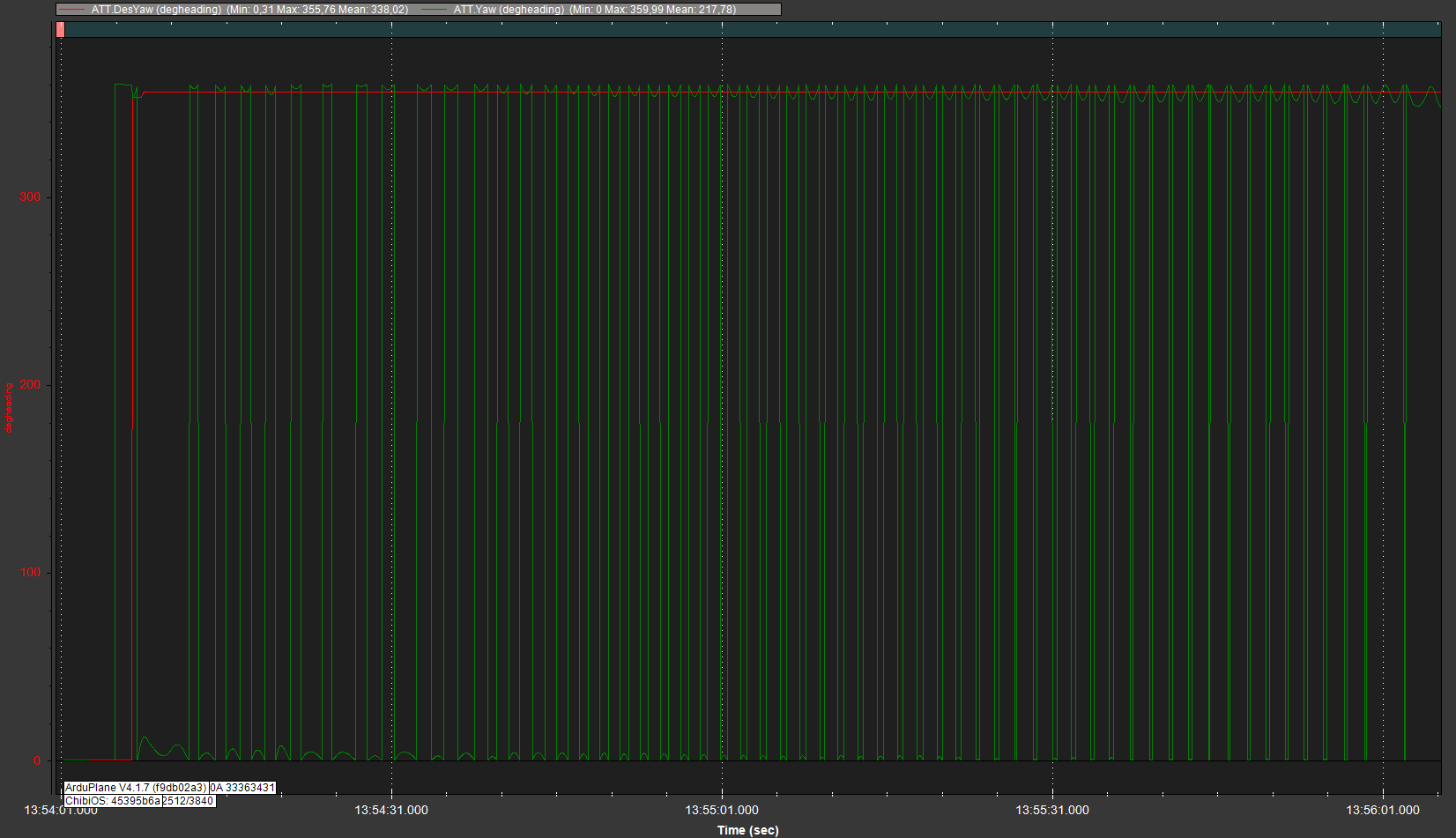
Log when flying on mockup: (looks good!)
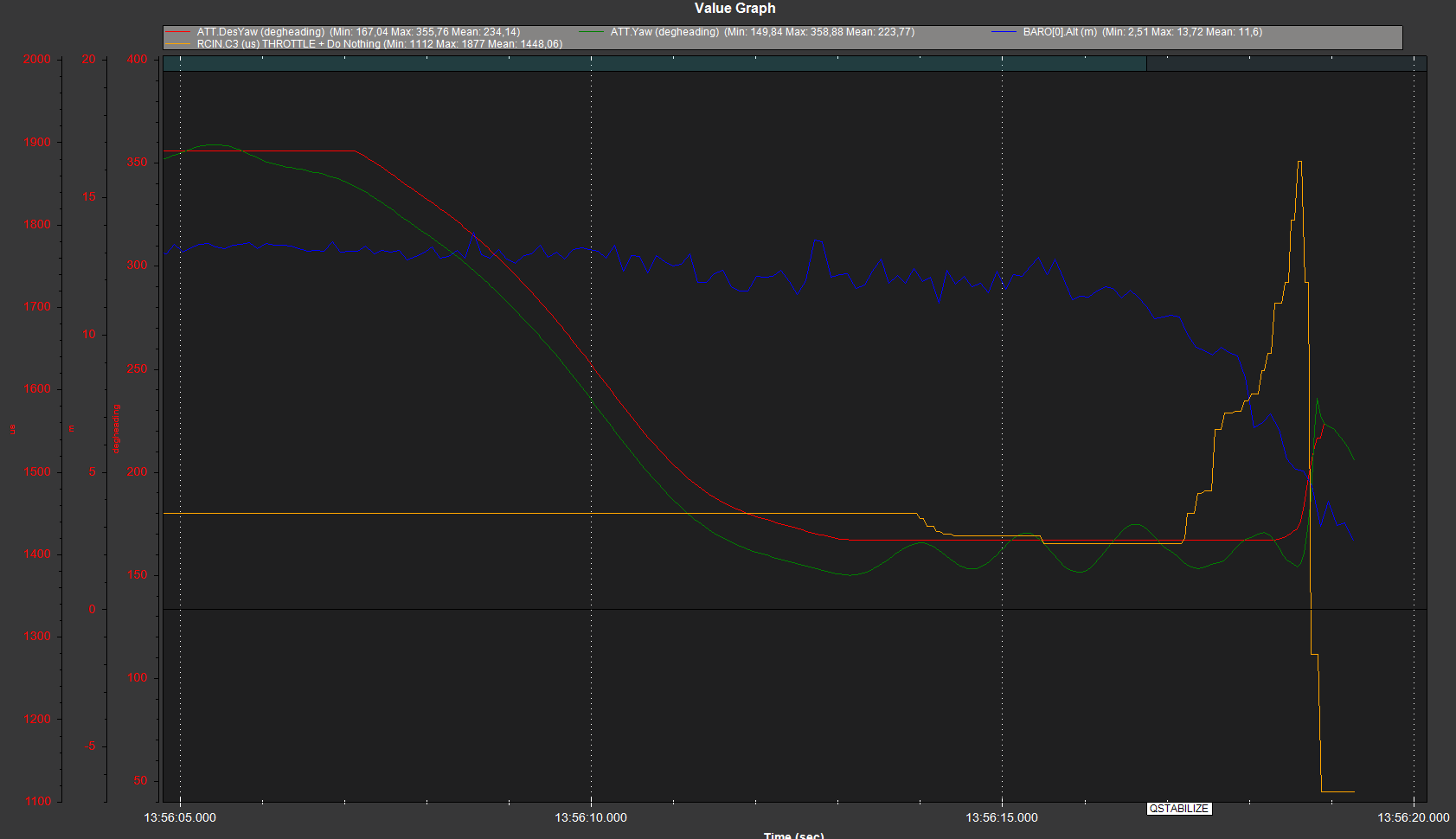
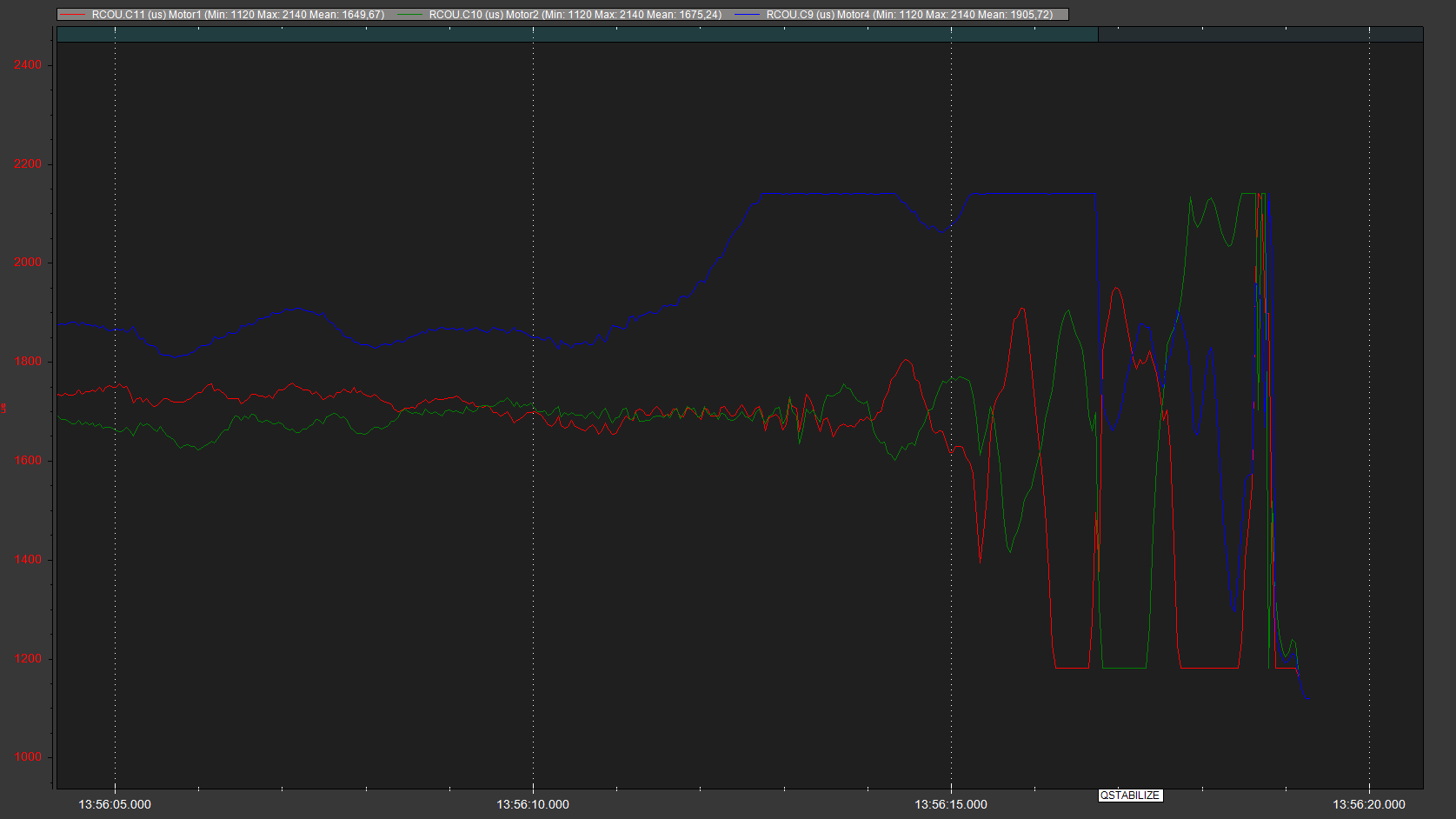
Log when full-fledged (you can see how desyaw has changed):
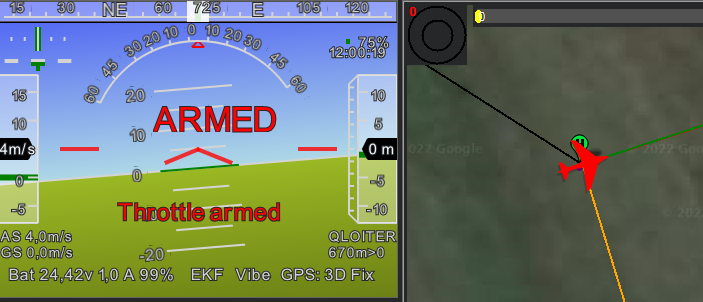
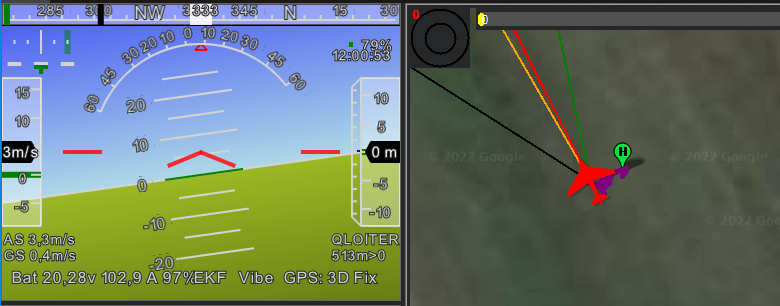
Changes on map( full-fledged). Looks like in reality. The plane was launched into the wind, stood sideways to the wind, so it keeps a roll. In reality it also turned 90deg:
It seems to me that the turning of the aircraft by the wind and the increase in the magnetic influence on takeoff cause this event. Should I disable gsf and how can I do it? Are there other solutions to this problem?
Thanks for any answer