I posted a thread in the tuning section last week but am reposting with a more specific question. This is on a ~24 kg X8 that is flying quite well besides some small issues with the baro and yaw. I am trying to get the yaw to be more crisp. Right now it bounces back quite a bit. Let go of the rudder stick and the copter stops yawing but then bounces back the opposite direction some… It’s very repeatable. Log # 36 has quite a lot of repeated yaw movements so it’s easy to spot. I cannot seem to get this to respond to any PID changes to yaw, could be another issue.
Had similar issues with a 12kg Octo.
Seemed to be a lot of compass problems, and eventually after many recalibration and disabling all but the highest external, and auto tuning yaw with varying aggressiveness settings, it was acceptable.
I would, however, suggest you take a close look at the new rc1 release.
Maybe not install it yet on your big rig, but the loiter and yaw response is markedly different and very crisp and precise.
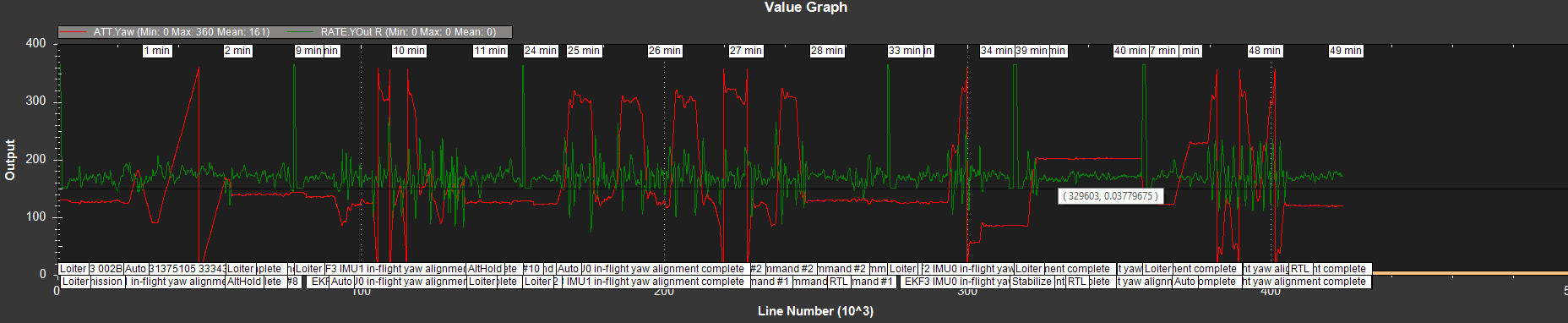
Looked at your log. There seems to be an imbalance in your yaw output. The flight controller is constantly commanding a yaw right in order to keep the heading constant:
RATE.YOut (and POut and Rout) should be centered about 0 when hovering in still air.
This is likely a mechanical issue, probably from a motor arm being twisted a bit so that the motors aren’t level. Check your mechanics to see if you can fix this issue first, then see if your yaw overshoot issue persists.
That said, I don’t actually think that’s the cause of the overshoot, since the PIDs and motor outputs aren’t being saturated by this or by your yaw commands. Glancing at your PIDs, it looks like your yaw rates are a bit low. You have ATC_RAT_YAW_P = 0.18 and _I = 0.018, which is about the same as your pitch and roll rates. At least in my experience, yaw tends to be several times more than pitch and roll, so it might be worth trying to tune these two parameters upwards.
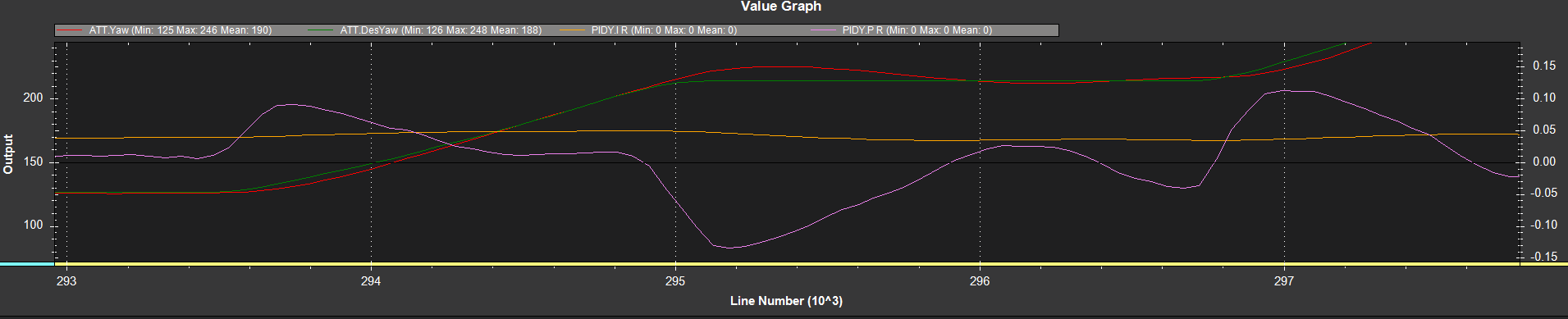
You have PID logging on, which is nice. Here, you can see the yaw P trying to stop the drone from turning as soon as the yaw and desired yaw diverge, but it probably just isn’t trying hard enough. You can also see the I term is constantly wound up thanks to the aforementioned yaw bias. Besides tuning manually, you could also try running an autotune for the yaw axis to see what you get.
Thanks for your time! There is a very slight twist on 1 motor mount (well 1 pair of motors). I had suspected that but as you mentioned it didn’t look to be saturating the outputs. Will address that first of all. I didn’t know about the PID logging, just got lucky with my logging bitmask but that is super helpful. I will go for the yaw autotune again. I did it a while ago but got super aggressive results and I just went back to what I had without revisiting it.
I had this issue on a couple of builds and each time it was too much compass interference. Positioning the compass higher made it crisp without even retuning.
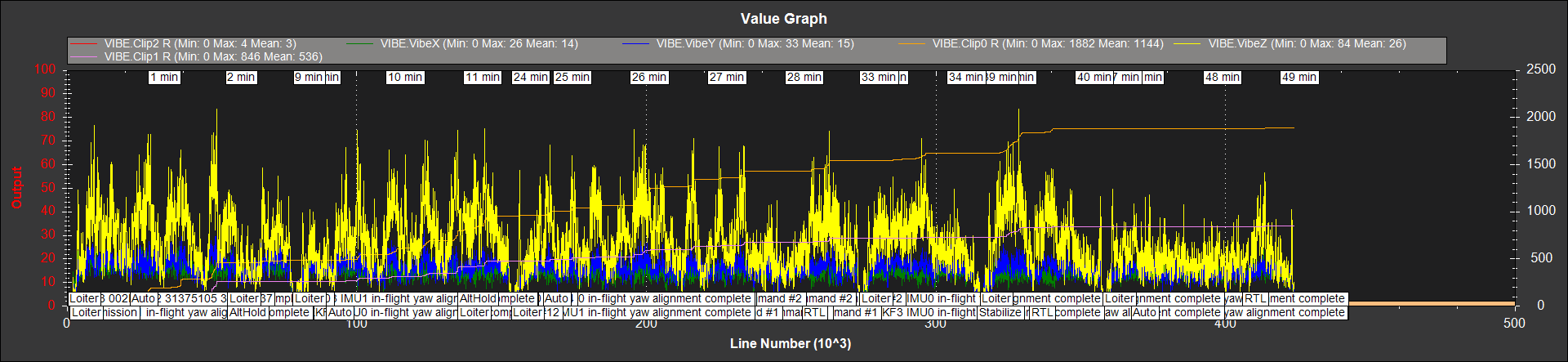
I believe this is due to my avionics stack shearing the rivets fastening it to the main frame some time during this flight or a previous flight. After this flight the whole stack could move around somewhat freely although I suspected some vibes was caused by the tune. Repairs and reinforcement is under way and more testing tomorrow.