Hello people!
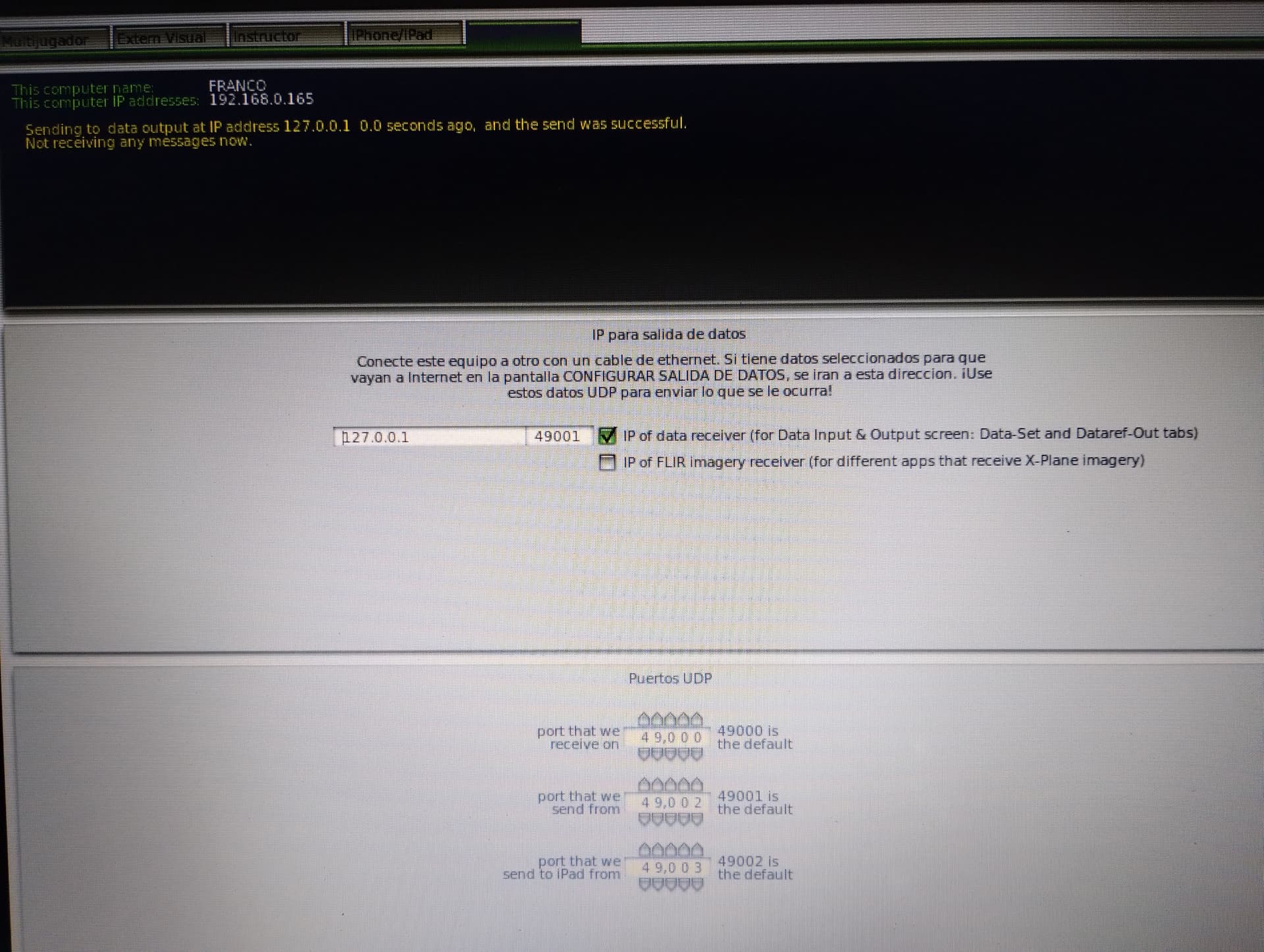
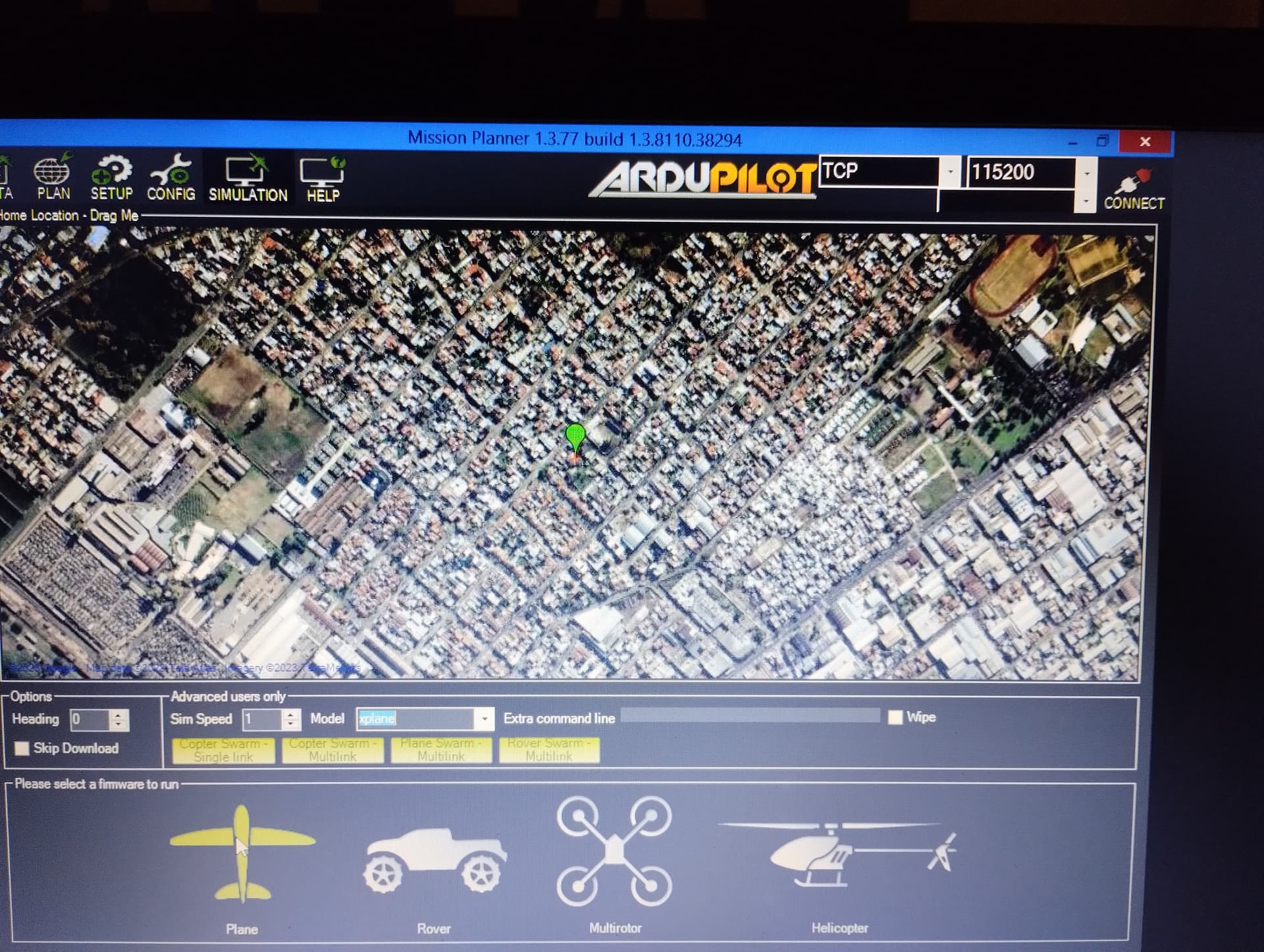
I am trying to run SITL with Xplane’s Bell Ranger and Mission Planner, following carefully the instructions and video from @tridge given here http://ardupilot.org/dev/docs/sitl-with-xplane.html
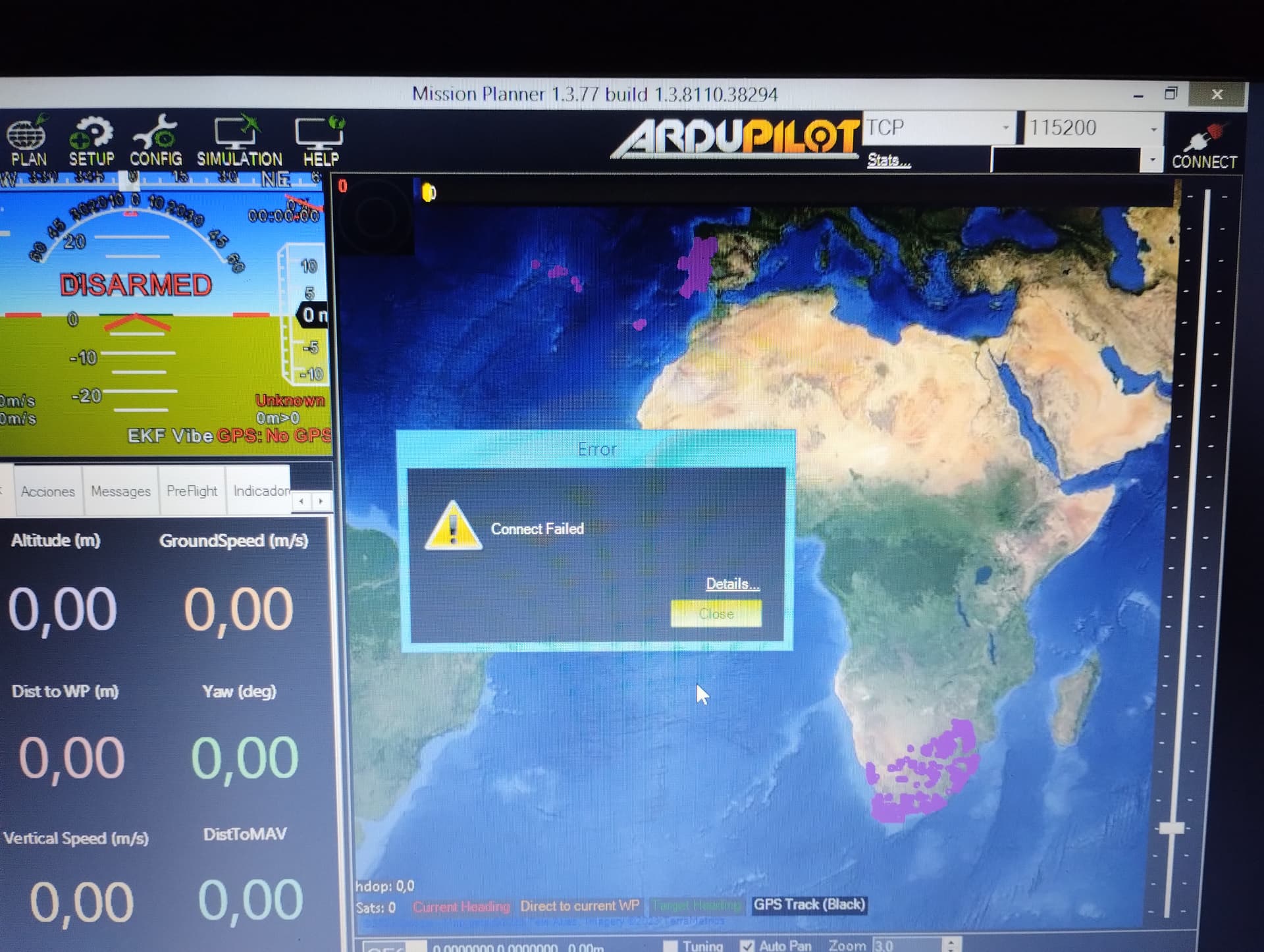
With Mission Planner version 1.3.48 build 1 and SITL’s Arducopter 3.6 dev, I was not able to successfully run the SITL - at least not everything.
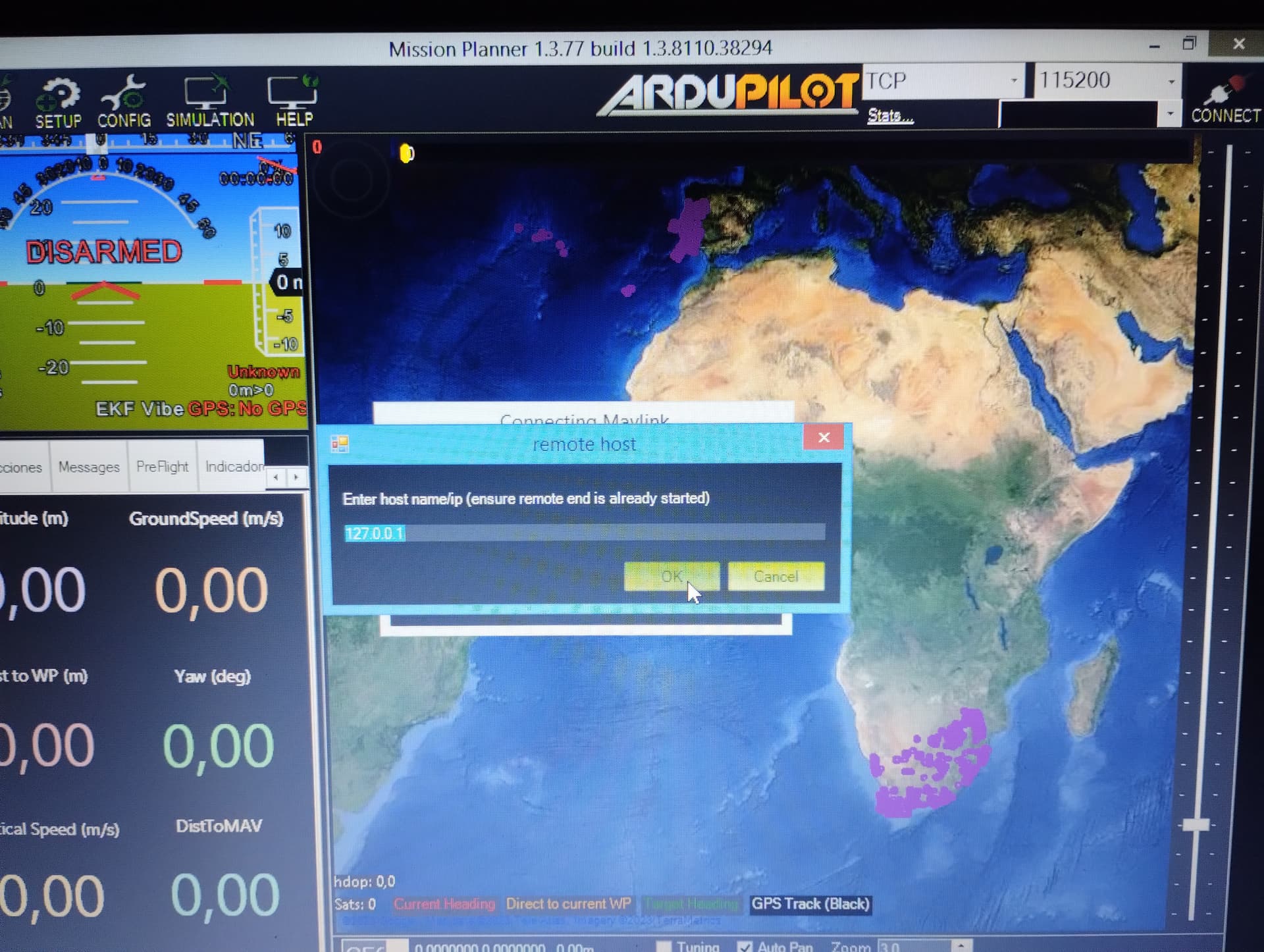
- Connection with Xplane (v 10.51 r2, via Steam) was good
- I was at least able to get to AltHold and Loiter and have the helicopter somewhat loitering / hovering (horrible swaying but it stayed aloft).
- I’m using the param file from here http://uav.tridgell.net/XPlane/
The problem comes when I tried to get the helicopter into AUTO mode, it stubbornly refuses - throwing up errors like “Failsafe: Terrain Data Missing” and then disarm (even though I’ve disabled the param TERRAIN_ENABLE) and “Missing Takeoff Cmd” (even though I’ve included a takeoff command).
I’ve also tried a few things:
- With the exact same setup, I was able to get SITL to work with Xplane’s SITL. Getting into Auto and running the mission wasn’t a problem. Flew beautifully.
- Get the heli up in the air Loitering and then switch to auto - however, error “Failsafe: Terrain Data Missing” comes up
- I tried running exact version of MIssion Planner in Tridge’s video here https://www.youtube.com/watch?v=JNNSoMrAFn4 and older MP versions as well, BUT mission planner still downloaded ArduCopter 3.6 dev ; same problem persisted
- I tried looking around for way to change MP’s SITL firmware version but to no avail.
Could someone point to a direction that I can debug or figure out? I’ve kinda ran out of options here.
Thank you!
OngTianChangYonah

- Flight Mode Change Failed Error
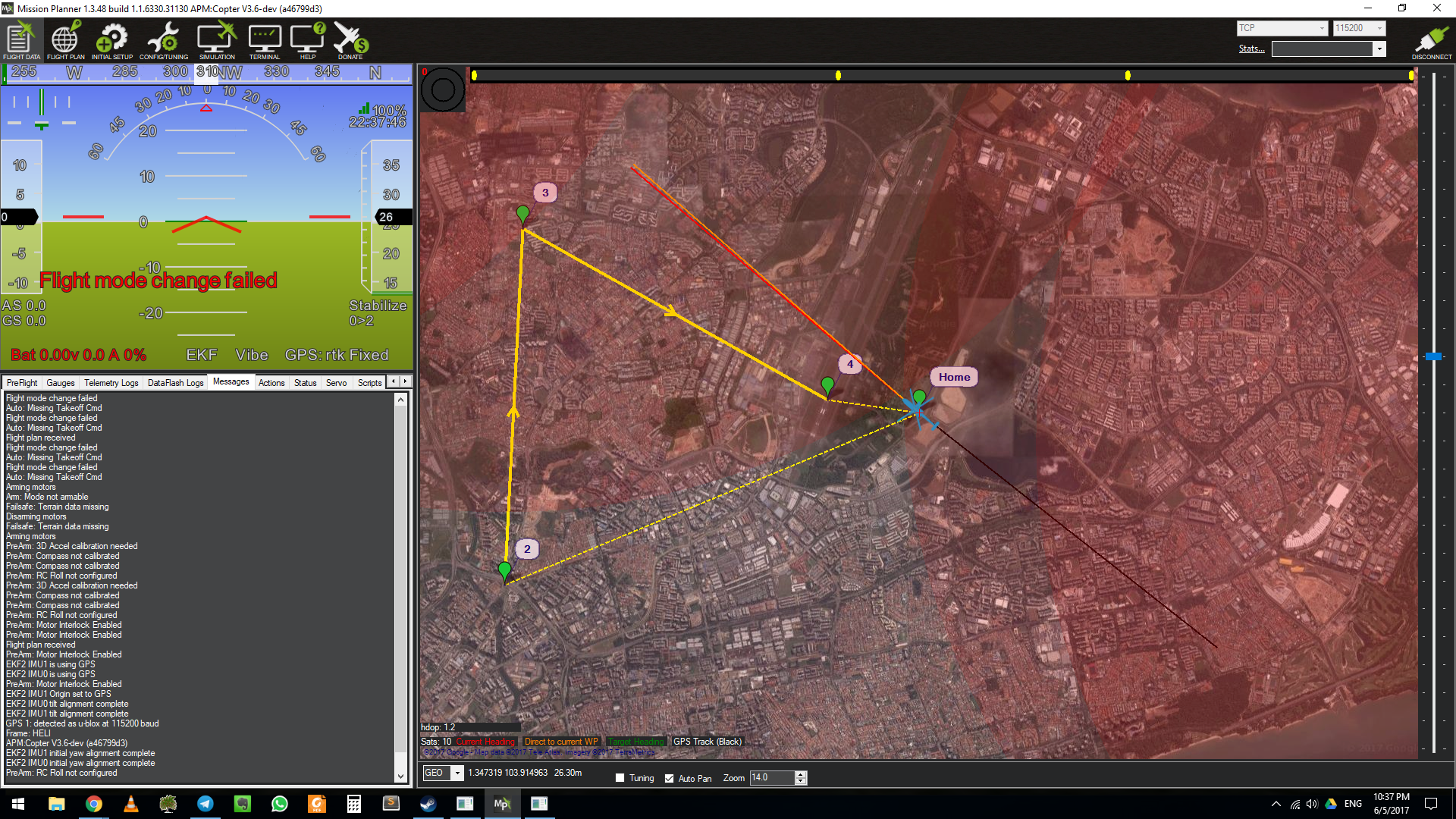
- Flight Mode Change Failed Error due to Missing Takeoff Cmd
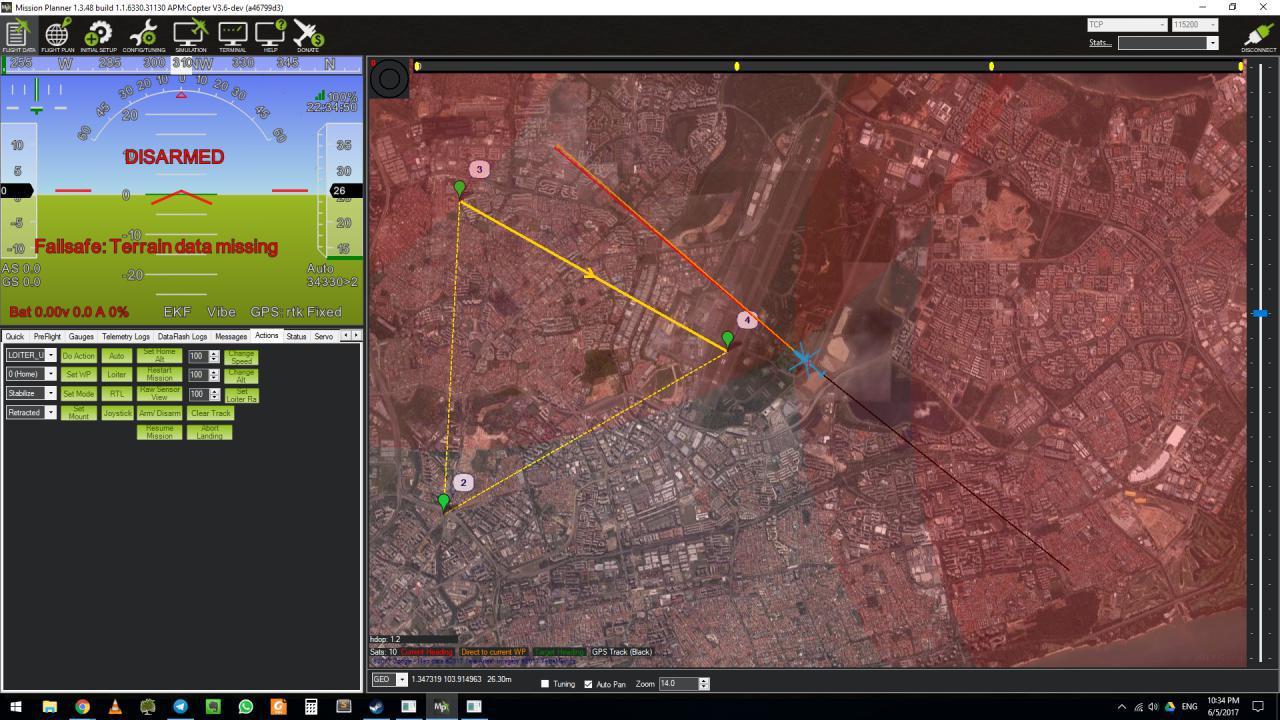
- Failsafe: Terrain Data Missing error
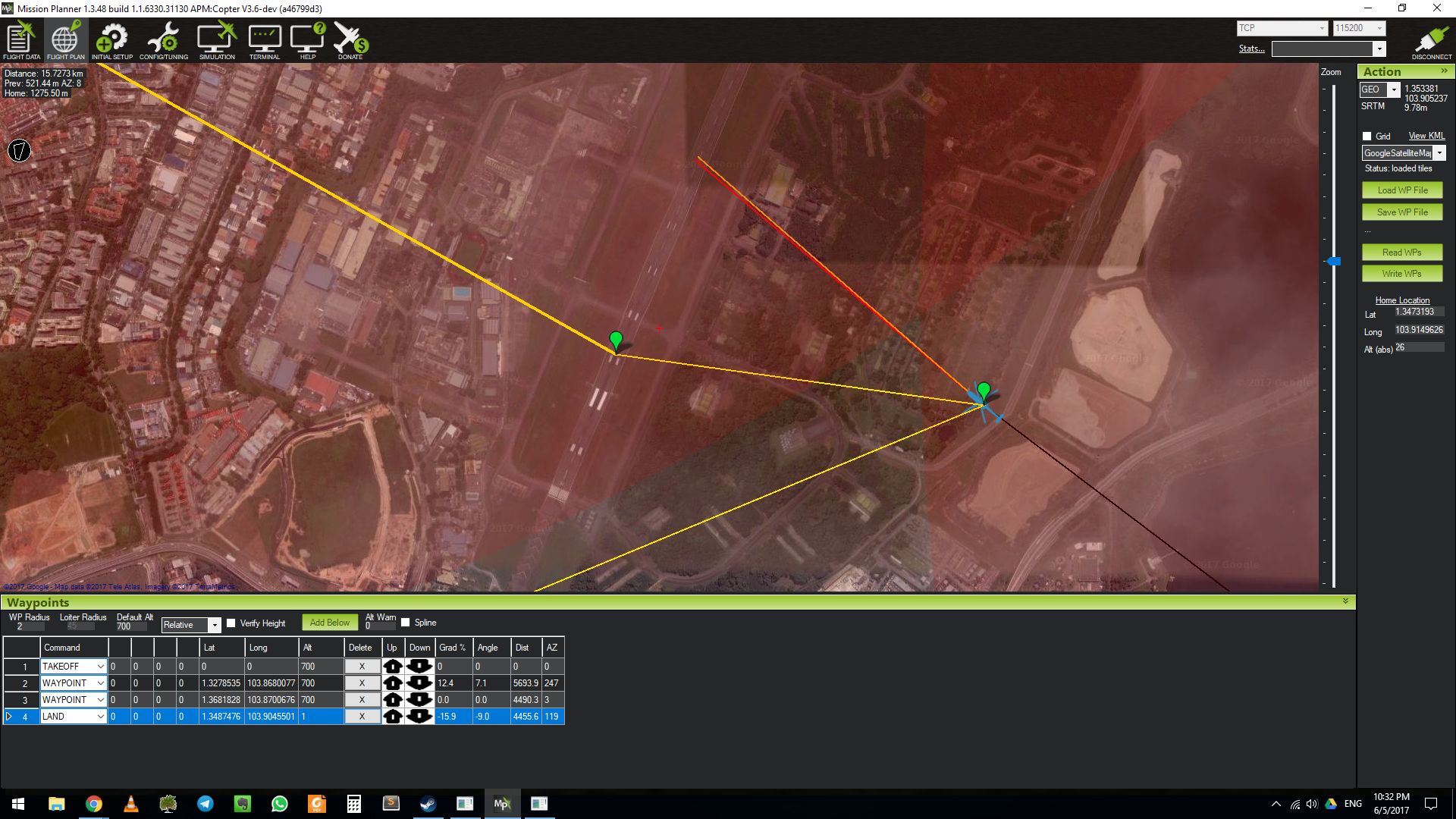
- The sample flight plan that I’m using
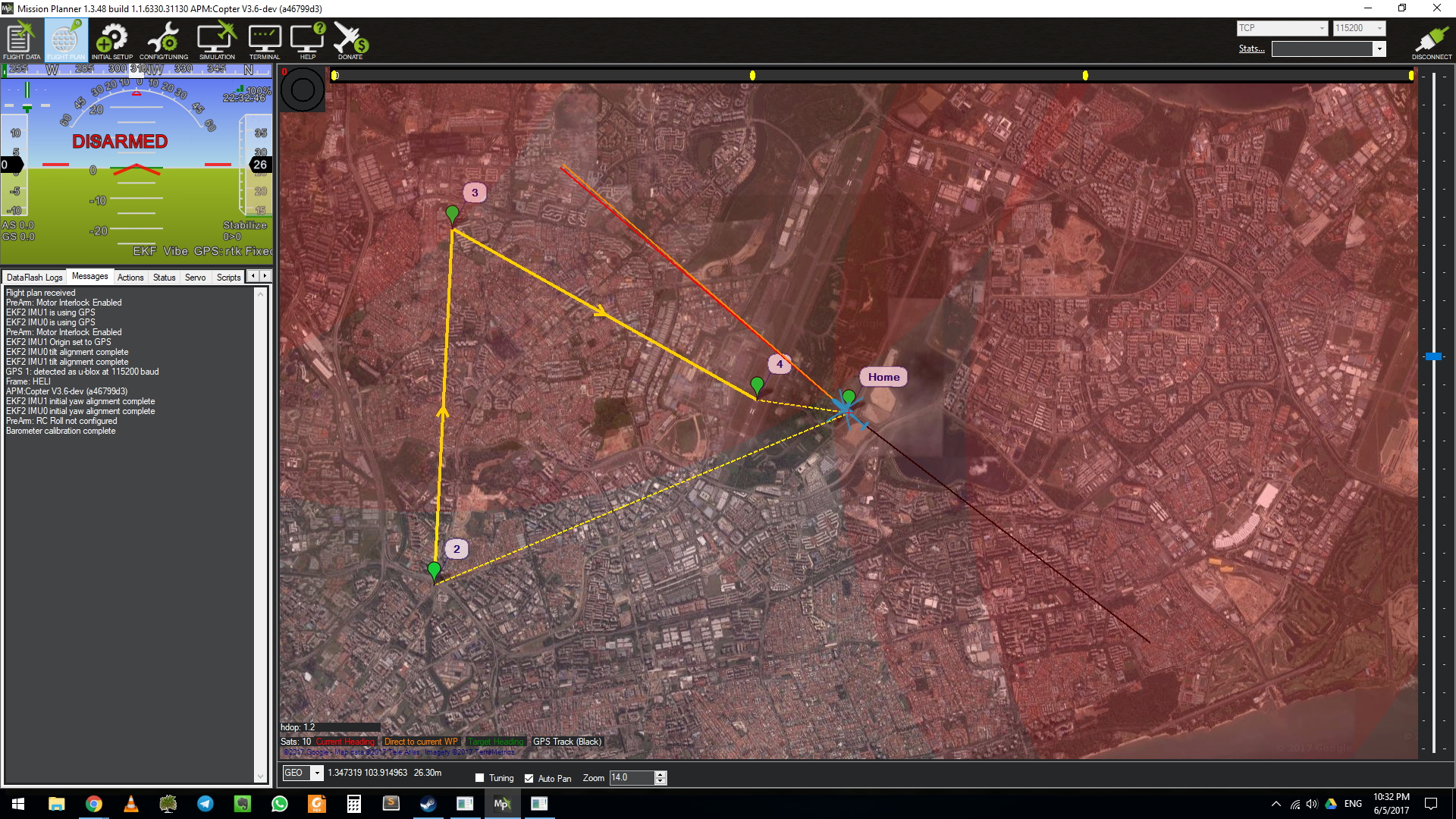
- Flight Plan received confirmation
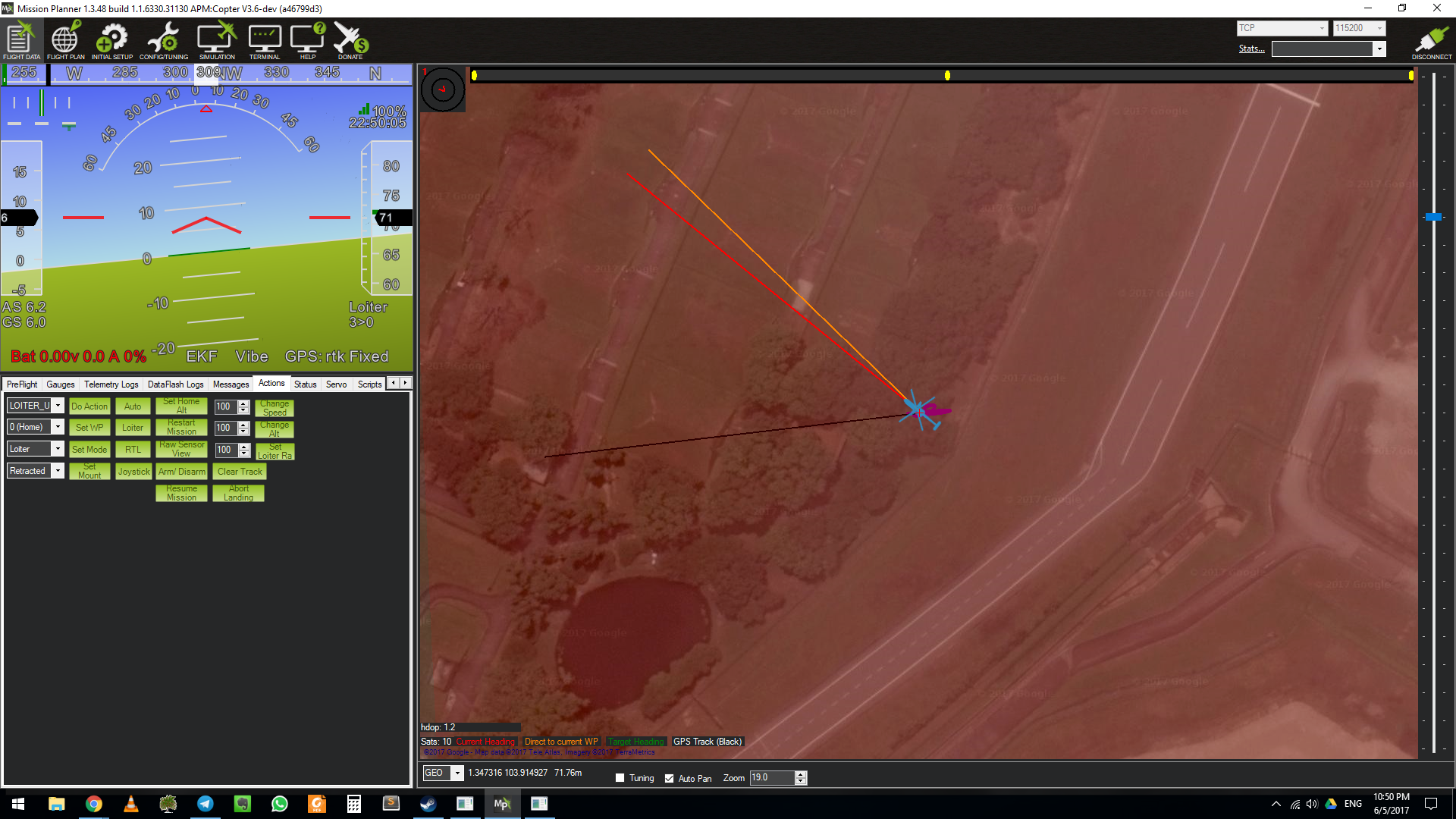
- Loiter Hover at 71 meters with no issue