for a new copter setup I’m trieing to setup a telemetry between copter and Mission Planner using two XBee 3 Pro radios. The radio for the GCS is mounted on a Sparkfun Explorer USB adapter. The radio on the copter is mounted on a Sparkfun Explorer regulated board and connected to telemetry port 2.
I have programmed the two radios in the Digi XCTU software to communicate with each other in transparent mode. I have tried the communication between the two radios in XCTU and all works fine. When I connect the copter radio to the copter and try to connect through mission planner, the timeout counts down and finaly shows an error message “No Heartbeat Packets Received”. I have already tried to change RX and TX lines but no success.
It might be still a problem with the programming of the radios although they communicate in XCTU.
Does anybody have experience with the XBee 3 Pro radios and knows how to program them to use them as telemetry radios?
Is it possible that the hardware is not compatible? I think I have read somewhere that there might be a problem with pullup resistors and TTL level.
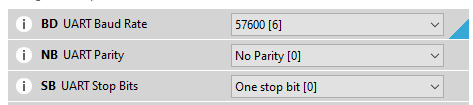
I’ve been using the Xbee Pro 900 for many years without any problems. I have the baud set to 57600. If you have them working with each other, then they should be ok.
I’d suggest that you verify they actually do work outside of XCTU by hooking them up to two computers and use a program like Putty to send and receive to each other.
One setting in MP that may be your problem is the:
TELEM_DELAY: Telemetry startup delay
The amount of time (in seconds) to delay radio telemetry to prevent an Xbee bricking on power up
I always set it at 10 seconds, as the Xbee Pro 900 was prone to bricking and I then had to reprogram them with XCTU again. You may not have this problem with a different Xbee then mine.
Other than that, I have used them on the original APM 2, Pixhawk, Holybro Pixhawk, and mRo Pixracer without any problems. For me the Xbee has been a great telemetry setup.
Again, I don’t have the Xbee 3 Pro, but if they work between computers with Putty then they should work with any serial connections.
I’ve tried the two radios connecting each each of them to a different computer and used putty for serial communication. I was able to send and receive on both computers.
After that test I set in Mission Planner the TELEM_DELAY parameter to 10 seconds and tried to connect but again without success.
Is there anything else I could try?
Ok, so we know the Xbee radios work together, and the USB adapter works on the computer with Mission Planner (?). Then I’d look at the Xbee radio on the copter.
You didn’t say which flight controller you are using, other than on telemetry port 2. If all else fails, I’d wire the telemetry port 2 directly to the computer with MP via a serial to usb adapter and verify it is working correctly. Stranger things have happened …
BTW, I’m using the Adafruit XBee Adapter kit - v1.1 product id: 126 for mine on the copter side and both Adafruit and Sparkfun usb adapters on the ground side.
I’m using a cube orange with the new ADS carrier board.
I wired the telemetry 2 port to the computer with MP via a serial to usb adapter and the connection worked.
I also tried connecting the copter xbee to a second computer using putty as serial monitor and send the connect command from the GCS computer running MP. I received a packet with some symboles which I gues should be some hex code.
Usually “some symboles which I gues should be some hex code” would mean a baud rate mismatch.
I don’t see what baud rate you are configured for. I use 57600 for the copter-Xbee and the Xbee-Xbee and Xbee-computer. You may have to slow things down …
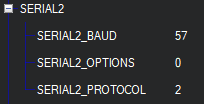
My settings are:
SERIAL2_BAUD,57
SERIAL2_PROTOCOL,1
I currently have BRD_SER2_RTSCTS,2 but do have a note from the past that I had to use BRD_SER2_RTSCTS,0 due to auto causing telemetry problems at boot.
My copter is at ArduCopter V3.6.12 so I don’t have a SERIAL2_OPTIONS.
My thought is you may need to change the SERIAL2_PROTOCOL to 1.
I have already tried setting SERIAL2_PROTOCOL to 1 but still no communication.
I tried as well setting BRD_SER2_RTSCST to 2 (had it on 0) but no success.
It seems like you have done all you can, with some help from me, to isolate the issues to the FC. The Xbee is working as it should, from computer to computer with Putty, so the issue is elsewhere.
From what I can see, there have been a lot of issues with the Cube Orange FC and its’ serial ports. Maybe someone on their support forum could help further.
I bought a different xbee adapter board (https://www.ebay.de/itm/164075885314) just to see if the com problem came from the sparkfun explorer board I was using and gues what, the xbees are communicating with the new board.
Still I want to thank you for your help and your time.