My X8+ looks to be tilted to back and left while in STD mode and drifts to the back. I touch NONE of the sticks and it drifts for meters. Video 1. Is this normal for STD mode?
I have also noted a strange sound from Pixhawk. Video 2. What does this “dying” sound mean? It is not obvious in the video, but it seems as if the sound “touches” all the props in clockwise direction.
The drift is usually due to accelerometers not being calibrated level or the PH not sitting exactly level.
Have you also checked that all motors are level?
Have you checked the logs for vibration levels?
In the second video I can hear the usual motor beep and that slight noise from the PH buzzer.
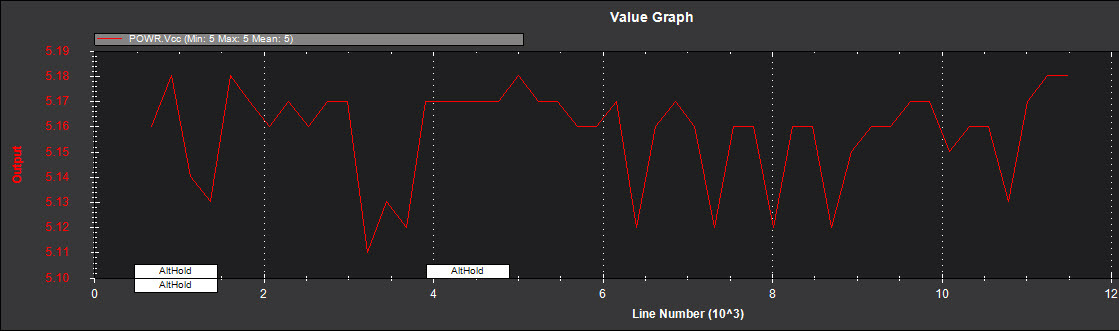
Have you looked at the Vcc value in the logs to see if it is a voltage fluctuation causing it?
Is the PH a genuine 3DR or a clone?
I’ve purchased the X8+ from US based seller and he assured me that it was a genuine 3DR product and it actually looks like one. However, I am no expert and cannot be 100% sure.
Just covering the obvious questions:
What flight mode were you in?
It looks like Stabilise.
Was there any breeze?
I thought I saw a slight tree movement
Do you have any sort of ground station you can connect to in flight?
You will nearly always get some drift in Stabilise.
It might be a slight air movement, or one or more motors not being EXACTLY level, even the Pixhawk being ever so slightly not level that you might not notice.
How does it fly in Loiter?
The ESC’s beep the motors when they have no input signal, which happens before you arm the Pixhawk.
The voltage is only fluctuating from 5.18 to 5.11 which might well be in the measurement error range of the ADC.
Definitely not anything to worry about.
If it was fluctuating more than .3 or .5 I might look into it.
Yea my power module hates life and fluctuates around .5 every flight and I’m only powering my receiver and GPS off the board. I looked into it and the majority of the ‘3DR’ power modules sold online are just clones, and they are missing a filtering capacitor, which is why we get fluctuations. I’m thinking about adding a ceramic capacitor just along the power rail of the APM to see if I can filter out some of the noise and get the fluctuations down. I have OPTO esc’s so I know those aren’t messing with the draw, and I don’t have any large VCC dips under full throttle, so I’m assuming it’s just the power module not having good filtering (if any).